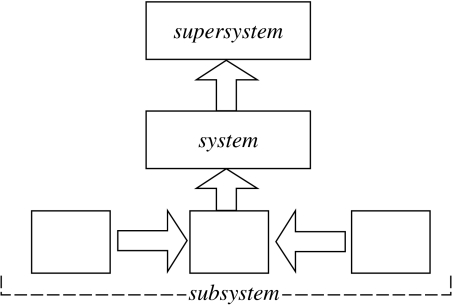
Biomimética: el arte de imitar a la naturaleza

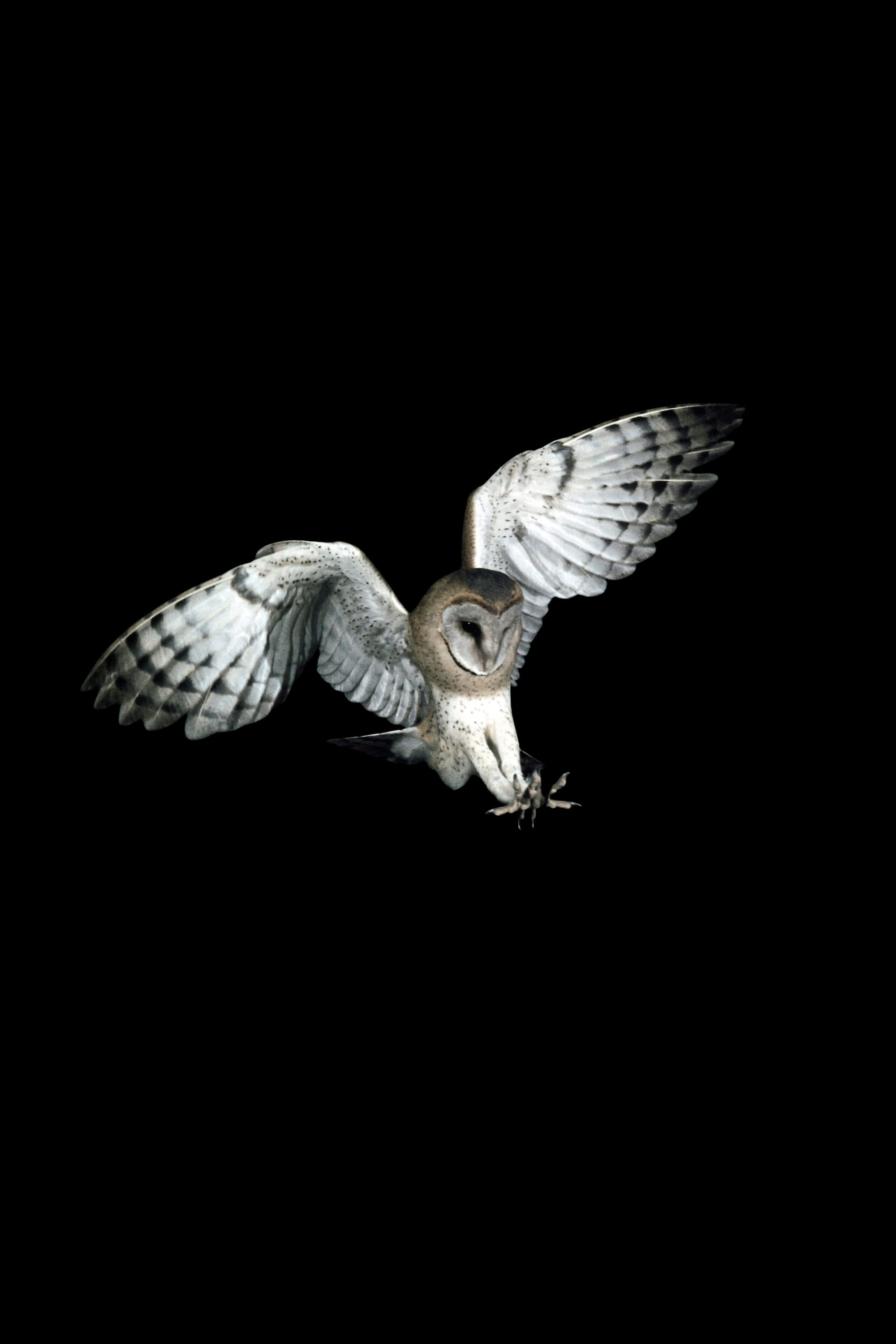
Desde las alas silenciosas de los búhos hasta la extraordinaria resistencia estructural de los huesos humanos, la naturaleza ha perfeccionado durante millones de años soluciones de ingeniería que hoy apenas comenzamos a comprender en profundidad.

La biomimética o biomímesis (de bio, "vida", y mimesis, "imitar") es la disciplina que estudia y replica estrategias biológicas para resolver problemas tecnológicos. Surge precisamente de esta idea fundamental: la evolución ya ha realizado innumerables “experimentos” de diseño, y aprender de ellos puede acelerar de forma extraordinaria la innovación científica e industrial.
Lejos de ser una simple fuente de inspiración estética, la biomimética constituye hoy un campo multidisciplinar que integra biología, física, ingeniería de materiales, robótica y diseño computacional. Superficies antibacterianas e hidrodinámicas inspiradas en la piel de tiburón, estructuras ligeras derivadas de la geometría de los panales de abeja o sistemas de ventilación basados en los termiteros africanos demuestran que las soluciones naturales no solo son eficientes, sino también sostenibles y adaptadas a condiciones extremas.
En un contexto donde los desafíos tecnológicos exigen simultáneamente eficiencia energética, resiliencia estructural y sostenibilidad ambiental, mirar hacia la naturaleza deja de ser una curiosidad científica para convertirse en una estrategia de innovación esencial. Comprender cómo funcionan los sistemas biológicos, desde sus microestructuras hasta sus dinámicas evolutivas, permite diseñar tecnologías más inteligentes, más eficientes y, en muchos casos, más armonizadas con el entorno que las rodea.
¿Cómo resolvería este problema la naturaleza?
Esta pregunta constituye el núcleo de la biomimética y define su enfoque metodológico, sustentado en tres ideas fundamentales:
- La naturaleza como modelo. La biomimética analiza las estructuras, mecanismos y estrategias desarrolladas por los sistemas biológicos, utilizándolos como referencia para diseñar soluciones tecnológicas capaces de afrontar desafíos humanos mediante la imitación o reinterpretación de esos principios naturales.
- La naturaleza como maestra. Las innovaciones biomiméticas se evalúan a la luz de criterios ecológicos, considerando que la vida en la Tierra ha sido sometida durante unos 3.800 millones de años a un proceso continuo de selección evolutiva que ha depurado aquello que funciona, lo que resulta eficiente y lo que puede mantenerse a largo plazo.
- La naturaleza como medida. Este enfoque propone una transformación conceptual: en lugar de preguntarnos únicamente qué recursos podemos extraer del entorno natural, debemos aprender a valorar cuánto podemos comprender y aplicar de sus soluciones, orientando el progreso tecnológico hacia modelos inspirados en el aprendizaje de la propia biosfera.
Historia de la biomimética
A decir verdad, la historia de la biomimética no comienza en laboratorios modernos, sino en la propia intuición humana de observar la naturaleza como maestra de ingeniería. Desde las primeras civilizaciones, el ser humano ha intentado reproducir soluciones naturales: las lanzas imitaban colmillos, las embarcaciones copiaban formas hidrodinámicas de peces y las viviendas tradicionales se adaptaban al clima siguiendo patrones observados en ecosistemas locales. Sin embargo, estas imitaciones tempranas eran intuitivas, no científicas.
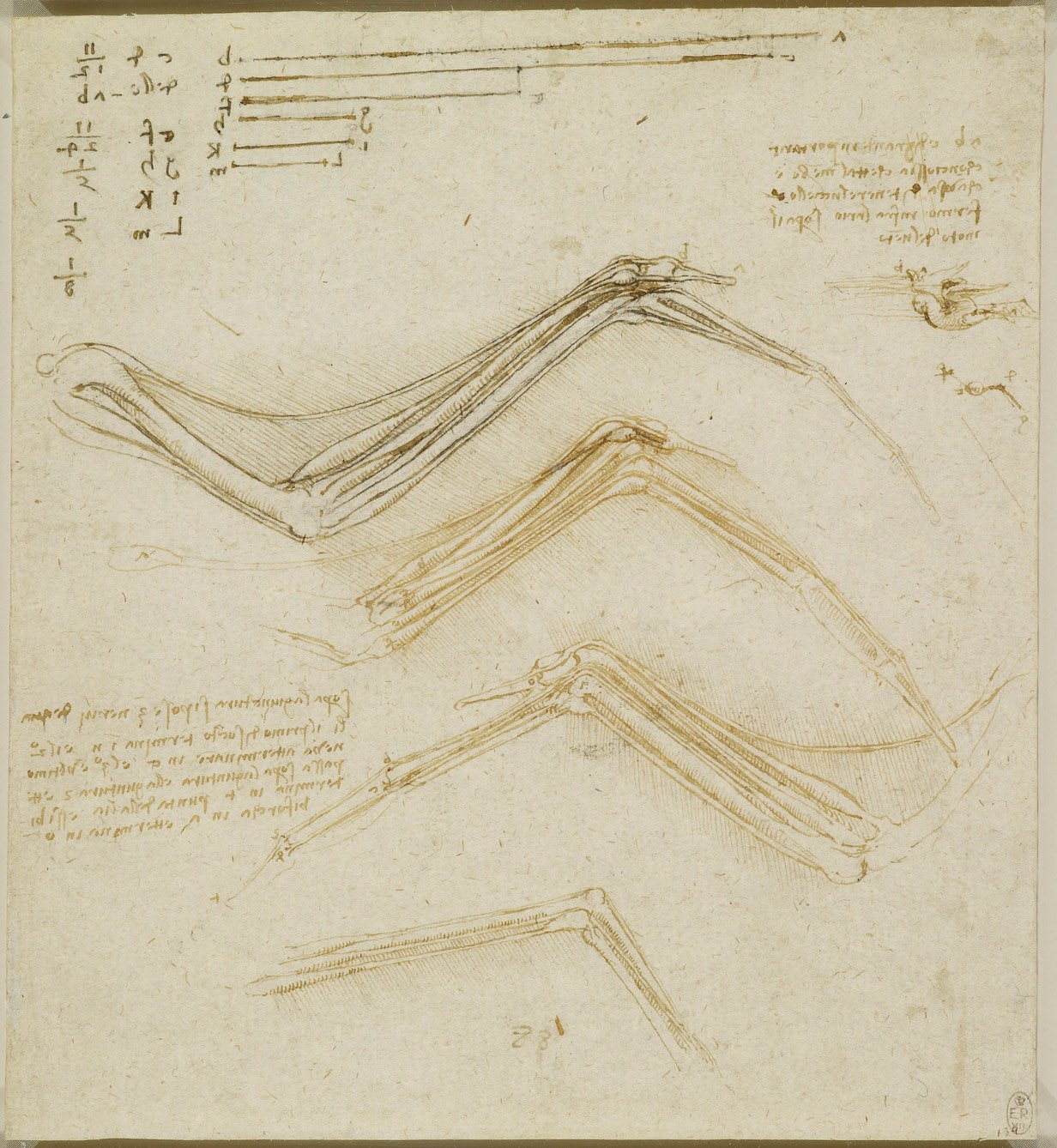
El primer gran salto conceptual se produjo durante el Renacimiento. Inventores y pensadores comenzaron a estudiar sistemáticamente los mecanismos naturales para comprender sus principios funcionales. Entre ellos destacó Leonardo da Vinci, que vivió entre 1452 y 1519, plenamente dentro del Renacimiento italiano, y encarnó el ideal del homo universalis: artista, ingeniero, anatomista e inventor. Sus estudios sobre el vuelo de las aves, la hidráulica, la mecánica y la anatomía humana reflejan precisamente el espíritu renacentista de observación sistemática de la naturaleza para comprender sus principios, una aproximación que hoy consideramos precursora del pensamiento biomimético.
El diseño de Leonardo da Vinci para una máquina voladora con alas basada en gran medida en la estructura de las alas de los murciélagos.
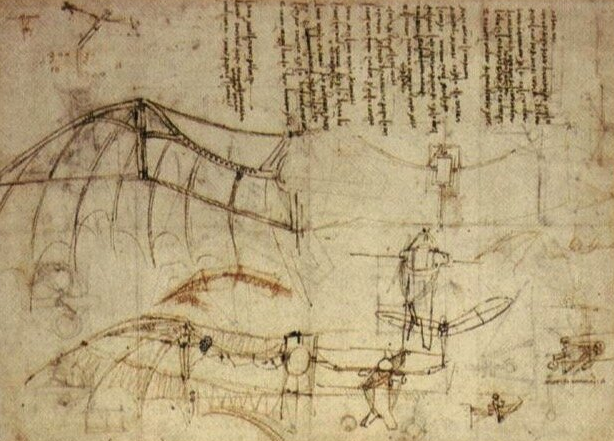
Anatomía de las alas de un pájaro por Leonardo da Vinci (1512). Crédito: https://www.rct.uk/collection/912656/the-anatomy-of-a-birds-wing
Durante los siglos XIX y XX, el desarrollo de la biología, la física y la ingeniería permitió pasar de la mera inspiración estética a la imitación funcional. En la década de 1950, el biofísico estadounidense Otto Schmitt desarrolló el concepto de biomimética mientras investigaba los mecanismos de propagación de señales nerviosas en calamares. En el marco de estos estudios diseñó el conocido Schmitt trigger, un dispositivo electrónico inspirado directamente en el comportamiento de los impulsos neuronales. A partir de esta experiencia comenzó a promover una nueva perspectiva científica: la idea de que los sistemas biológicos podían servir como referencia directa para el diseño de tecnologías e instrumentos de ingeniería.
En esos mismos años surgió también el término biónica, introducido por Jack E. Steele en 1960 para describir la ciencia dedicada al estudio de sistemas cuya función se basa en procesos observados en la naturaleza o que reproducen características de los sistemas biológicos. Con el tiempo, sin embargo, el término “biónica” fue adquiriendo en la cultura popular asociaciones con implantes artificiales y capacidades humanas aumentadas, lo que llevó a gran parte de la comunidad científica a preferir la denominación “biomimética”, más precisa desde el punto de vista académico.
A finales del siglo XX comenzó a difundirse ampliamente el concepto de biomimicry (biomímesis), especialmente tras la publicación de obras divulgativas que definían este enfoque como una disciplina orientada a estudiar los modelos naturales y aplicar sus principios para resolver problemas tecnológicos y sociales. Este planteamiento subrayaba además un cambio de enfoque: considerar la naturaleza simultáneamente como modelo de diseño, referencia de evaluación y fuente de aprendizaje para el desarrollo de innovaciones sostenibles.
Desde entonces, el estudio de estrategias inspiradas en sistemas biológicos —incluyendo comportamientos colectivos como los observados en colonias de insectos— ha encontrado aplicaciones en campos tan diversos como la ingeniería de materiales, la robótica, la economía organizacional y la gestión empresarial, consolidando la biomimética como una disciplina interdisciplinar clave en la innovación contemporánea. En la actualidad, la biomimética se entiende no solo como una herramienta de innovación tecnológica, sino como un cambio de paradigma: pasar de una ingeniería basada en la extracción de recursos a una ingeniería basada en el aprendizaje de los sistemas naturales. Este enfoque propone que las tecnologías del futuro no solo imiten las formas de la naturaleza, sino también sus principios de eficiencia, circularidad y sostenibilidad, transformando la relación entre desarrollo tecnológico y biosfera.
El caso Velcro: un clásico de la biomimética
Uno de los ejemplos más emblemáticos de biomimética es el desarrollo del Velcro, cuyo origen se remonta a la década de 1940. El ingeniero suizo Georges de Mestral observó que, tras pasear por el campo con su perro, numerosas semillas de bardana quedaban adheridas con gran firmeza a la ropa y al pelaje del animal.
Georges De Mestral y su perro Milka. Crédito: https://www.velcro.com/original-thinking/our-story/

Crédito: https://www.velcro.com/original-thinking/our-story/

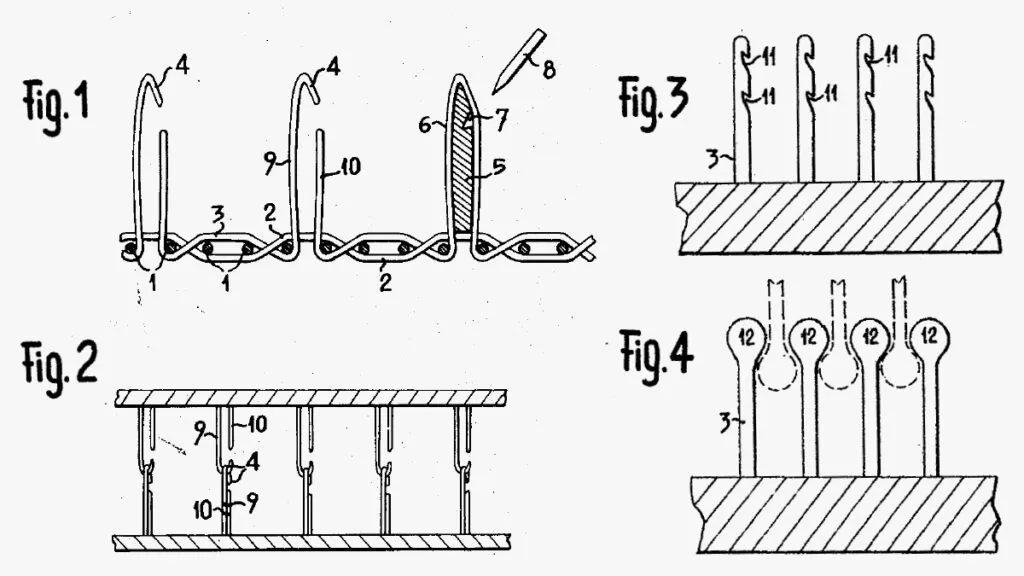
Intrigado por este fenómeno, examinó las semillas al microscopio y descubrió que su superficie estaba cubierta por diminutos ganchos microscópicos capaces de engancharse a fibras textiles o pelos.
Sistema de ganchos microscópicos en los que está basada la tecnología de Velcro. Crédito de la imagen: https://www.velcro.com/news-and-blog/2016/11/an-idea-that-stuck-how-george-de-mestral-invented-the-velcro-fastener/

En 1951, de Mestral presentó su patente original en Suiza, que fue concedida en 1954. También en 1954 nació la marca comercial VELCRO®, cuyo nombre se inspira en las palabras francesas velour (terciopelo) y crochet (gancho). Crédito: https://www.velcro.com/original-thinking/our-story/
En 1955, la innovación había cruzado los océanos, obteniendo una patente estadounidense y registros en toda Europa y Canadá. Esto marcó el inicio de un movimiento global que redefiniría la tecnología de fijación.
Demostrar la viabilidad del concepto fue solo el primer paso. El siguiente reto era la repetibilidad. Los primeros ganchos solo se podían fabricar a mano, lo que hacía que su producción a gran escala fuera lenta y difícil.
Cuando se le acabó el dinero, Georges de Mestral se encerró en una pequeña cabaña en el pueblo de Commugny, en los Alpes suizos, decidido a resolver el problema. La cuestión radicaba en los ganchos mismos: el material se tejía en forma de bucle, pero cada bucle debía cortarse en un ángulo preciso para funcionar correctamente, un proceso que era extremadamente difícil de controlar.
El avance se produjo con un método de corte inspirado en las tijeras de peluquero. Al mantener un ángulo de corte constante, de Mestral pudo finalmente diseñar un telar capaz de producir ganchos uniformes. Casi veinte años después de su idea inicial, esa precisión hizo posible la producción en masa de cierres de gancho y bucle.
No fue un éxito fugaz, y la idea tardó en popularizarse.
Incluso después de su llegada al mercado a principios de la década de 1960, los cierres de gancho y bucle tardaron en popularizarse. Los fabricantes tenían dificultades para comprender la finalidad de un sistema tan desconocido. Estaban acostumbrados a los botones, las cremalleras o las costuras permanentes, y muchos se preguntaban por qué debían cambiar. Parecía posible que el invento de de Mestral, como tantos otros antes que él, fuera descartado por interesante pero, en última instancia, poco práctico.
Entonces apareció la NASA. Mientras buscaba una forma de mantener los objetos sujetos a las paredes en gravedad cero, la agencia descubrió el sistema de cierre de la marca Velcro. De repente, el invento de ganchos y bucles de de Mestral dejó de ser una rareza, y pasó a ser un elemento de la era espacial.
A mediados de la década de 1960, los cierres de gancho y bucle comenzaron a aparecer en la ropa, incluida la alta costura. El diseñador francés Pierre Cardin adoptó el material, lo que contribuyó a su popularización. Con ese cambio cultural, el invento de de Mestral se convirtió oficialmente en un éxito.
Buzz Aldrin muestra su correa de reloj de la marca VELCRO® a Neil Armstrong en el Apolo 11. Foto: NASA.

Axones gigantes del calamar y el descubrimiento del potencial de acción
Los axones gigantes del calamar costero de aleta larga (Doryteuthis pealeii) desempeñaron un papel fundamental en el desarrollo de la neurofisiología moderna, especialmente en la comprensión del potencial de acción.
¿Por qué fueron tan importantes?
La mayoría de las neuronas poseen axones extremadamente finos (micrómetros), lo que dificultaba su estudio eléctrico a mediados del siglo XX. En cambio, el calamar presenta neuronas motoras que controlan la contracción rápida del manto —necesaria para la propulsión a chorro— cuyos axones pueden alcanzar diámetros de hasta ~1 mm, es decir, cientos de veces mayores que los de vertebrados.
Este tamaño excepcional permitió por primera vez:
- Insertar electrodos directamente dentro del axón.
- Medir con precisión el potencial de membrana en tiempo real.
- Determinar las corrientes iónicas responsables de la excitabilidad neuronal.
Los axones gigantes del calamar costero de aleta larga (Doryteuthis pealeii) fueron cruciales para que los científicos comprendieran el potencial de acción. Crédito: https://archive.org/details/icefalopodiviven00jatt/page/n61/mode/2up

En los años 40–50, los trabajos de Hodgkin y Huxley usando estos axones demostraron que el potencial de acción se produce por:
- Entrada rápida de Na⁺ (despolarización).
- Salida posterior de K⁺ (repolarización).
- Apertura y cierre dependientes de voltaje de canales iónicos específicos.
Estos resultados dieron lugar al modelo de Hodgkin-Huxley, base matemática y fisiológica de la neurociencia moderna, que describe el comportamiento eléctrico de la membrana neuronal mediante ecuaciones diferenciales acopladas.
Impacto científico
El estudio del axón gigante del calamar permitió:
- Establecer el concepto de canales iónicos dependientes de voltaje.
- Comprender la propagación del impulso nervioso.
- Desarrollar modelos biofísicos que hoy se aplican en neurociencia, cardiología eléctrica, neuroingeniería y simulación computacional de redes neuronales.
De hecho, muchos de los parámetros clásicos utilizados en simulaciones neuronales actuales derivan directamente de mediciones obtenidas en estos experimentos con calamares.
En sentido estricto, este caso en concreto no es un caso directo de biomimética, ya que el objetivo inicial no era imitar el sistema biológico, sino comprender los mecanismos fundamentales de la excitabilidad eléctrica neuronal. A decir verdad, el estudio del axón gigante del calamar pertenece originalmente a la neurofisiología experimental.
Sin embargo, sí puede considerarse biomimética en un sentido derivado o aplicado, cuando ese conocimiento biológico se utilizó para diseñar tecnologías inspiradas en él, como por ejemplo:
1. Ingeniería neuromórfica
- Modelos electrónicos que reproducen el comportamiento de las neuronas utilizando ecuaciones del tipo Hodgkin-Huxley.
- Circuitos electrónicos de neuronas de descarga pulsátil implementados físicamente.
- Microcircuitos neuromórficos que imitan redes neuronales biológicas.
2. Modelos bioinspirados de transmisión de señales
- Sistemas de comunicación que emplean pulsos discretos de señal de carácter impulsional.
- Líneas de transmisión activas con dinámica no lineal inspirada en las membranas excitables.
3. Neuroprótesis y biointerfaces
- Diseño de electrodos, técnicas de estimulación neuronal y algoritmos de control basados en la dinámica real del potencial de acción.
Termiteros y ventilación pasiva
En varias regiones del África subsahariana, especialmente en Zimbabue, las termitas del género Macrotermes construyen enormes termiteros que pueden superar varios metros de altura. Estas estructuras no son simples acumulaciones de tierra: funcionan como sistemas bioclimáticos altamente sofisticados capaces de mantener condiciones internas relativamente estables de temperatura, humedad y concentración de gases, a pesar de las fuertes variaciones térmicas del entorno.
El principio de funcionamiento se basa en la ventilación pasiva controlada. Los termiteros poseen:
- Conductos internos interconectados.
- Cámaras de intercambio térmico en profundidad.
- Aberturas microscópicas distribuidas en la superficie.
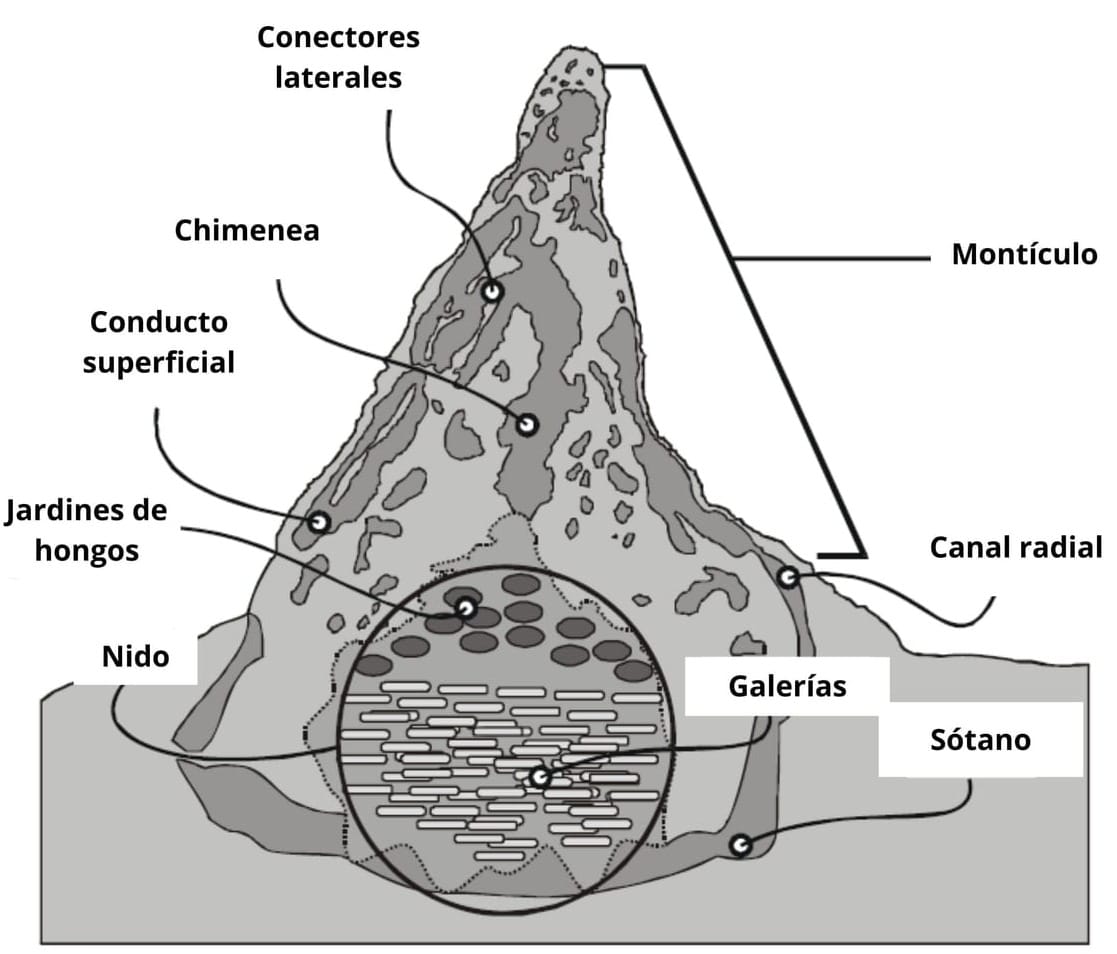
- “Chimeneas” superiores que facilitan la convección natural.
Durante el día, el calentamiento diferencial entre el exterior y el interior genera corrientes convectivas: el aire caliente asciende y sale por las chimeneas superiores mientras aire más frío entra por la base. Por la noche, cuando la temperatura exterior desciende, el flujo se invierte parcialmente, contribuyendo a estabilizar las condiciones internas. Este sistema permite mantener el microclima necesario para el cultivo de los hongos simbióticos de los que dependen las colonias.
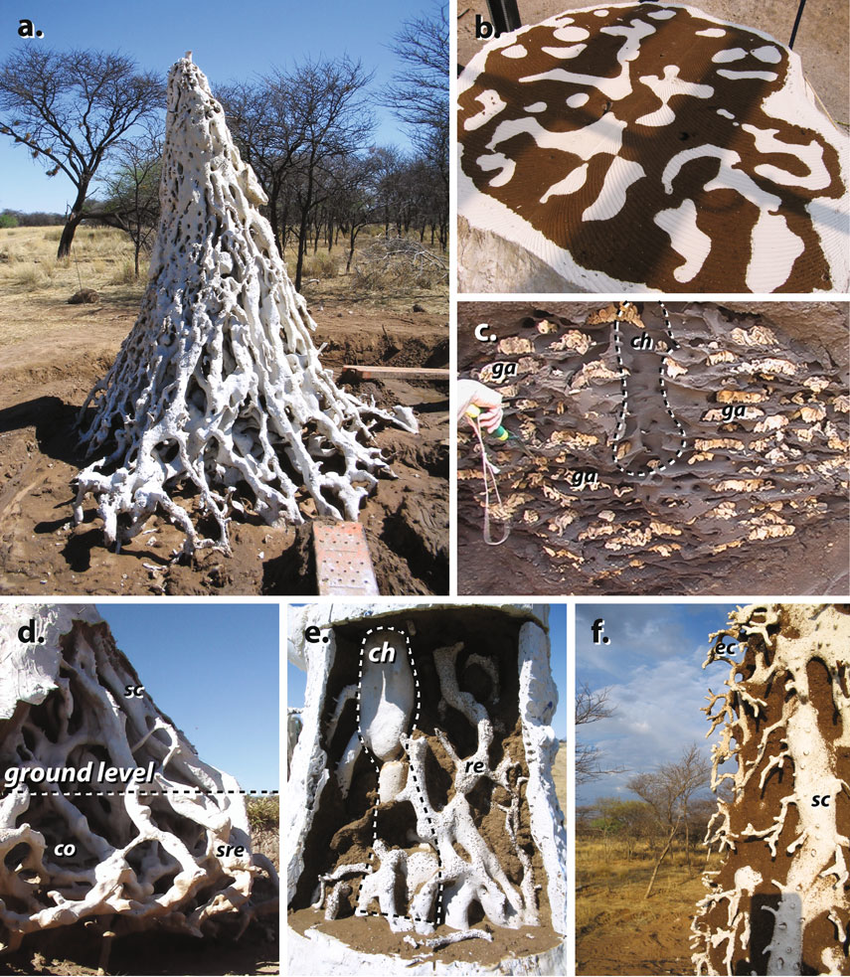
Elementos estructurales del montículo y el nido de Macrotermes michaelseni. (a) Molde de yeso expuesto de la red de túneles sobre el suelo de un montículo de Macrotermes michaelseni. (b) Corte transversal de una aguja rellena de yeso a media altura. Obsérvese los grandes túneles del centro, que se van reduciendo hacia los túneles más pequeños de la periferia. (c) Sección vertical del nido vista lateralmente. Obsérvese la chimenea, delineada por una línea discontinua, que penetra en el centro del nido, y las pequeñas aberturas que conectan la chimenea con las galerías circundantes. (d) Molde de yeso expuesto del retículo subterráneo. El nivel del suelo está indicado por la línea discontinua. (e) Molde de yeso expuesto del centro del retículo del montículo. (f) Molde de yeso parcialmente expuesto de un conducto superficial adornado con complejos de salida. ch: chimenea; co: colonia; ec: complejo de salida; ga: galería; re: retículo; sc: conducto superficial; sre: retículo subterráneo. Crédito: https://www.researchgate.net/publication/220058882_Termites_as_models_of_swarm_cognition
Sección transversal a través de un montículo y un nido de Macrotermes michaelseni, que muestra la ubicación del nido y el jardín de hongos, así como la disposición básica de la red de túneles de ventilación. Crédito: https://www.researchgate.net/publication/226421540_Termites_as_mediators_of_the_water_economy_of_arid_savanna_ecosystems
Aplicación en ingeniería humana
Este modelo inspiró el diseño de edificios con climatización pasiva, especialmente el complejo Eastgate Centre en Harare (Zimbabue), diseñado por el arquitecto Mick Pearce junto con ingenieros de Arup. El edificio utiliza un sistema de ventilación basado en masa térmica, conductos internos y circulación natural del aire, reduciendo de forma muy significativa el consumo energético asociado al aire acondicionado convencional (estimado en torno al 10–20 % respecto a edificios comparables climatizados de manera tradicional)
El caso constituye uno de los ejemplos más citados de biomimética arquitectónica porque demuestra cómo principios biológicos de regulación térmica pasiva pueden traducirse en soluciones de ingeniería urbana de gran escala, especialmente relevantes en climas cálidos y en el contexto de la eficiencia energética.
Adhesivos inspirados en los geckos: biomimética basada en fuerzas de Van der Waals
Otro ejemplo de biomimética moderna es el desarrollo de adhesivos inspirados en los lagartos gecko. Estos reptiles poseen la extraordinaria capacidad de desplazarse por paredes verticales e incluso caminar boca abajo sobre superficies lisas como el vidrio sin utilizar sustancias pegajosas.
El secreto reside en la estructura jerárquica microscópica de sus patas. Cada dedo del gecko está cubierto por cientos de miles de diminutos filamentos llamados setas, que a su vez terminan en estructuras aún más pequeñas denominadas spatulae. Esta enorme multiplicación del área de contacto permite que actúen simultáneamente millones de interacciones intermoleculares.
Las fuerzas responsables de la adhesión son principalmente fuerzas de Van der Waals, interacciones débiles entre moléculas que, consideradas individualmente, son muy pequeñas, pero que sumadas sobre millones de puntos de contacto generan una fuerza macroscópica significativa capaz de sostener el peso del animal.
Este mecanismo presenta características extraordinarias ya que permite la adhesión sin pegamentos ni líquidos, y dotando de una capacidad de encendido/apagado instantáneo mediante el cambio del ángulo de las setas. Además, estas superficies son autolimpiantes y cuentan con una reutilización casi indefinida sin pérdida apreciable de adherencia.
La almohadilla plantar de un gecko tokay (Gekko gecko) posee aproximadamente 5 000 setas por mm² y puede generar 10 N de fuerza adhesiva con aproximadamente 100 mm² de área de contacto (Fig. 1a–d). Por lo tanto, se predice que cada seta debería producir una fuerza media de 20 μN y una tensión media de 0,1 N mm⁻² (~1 atm). Las magnitudes reales podrían ser mayores, ya que es improbable que todas las setas se adhieran simultáneamente. Medimos la producción de fuerza de una única seta aislada durante la adhesión mediante un novedoso microvoladizo piezorresistivo micromaquinado de doble eje (Fig. 1e). Crédito: https://www.researchgate.net/publication/12455123_Adhesive_Force_of_a_Single_Gecko_Foot-Hair
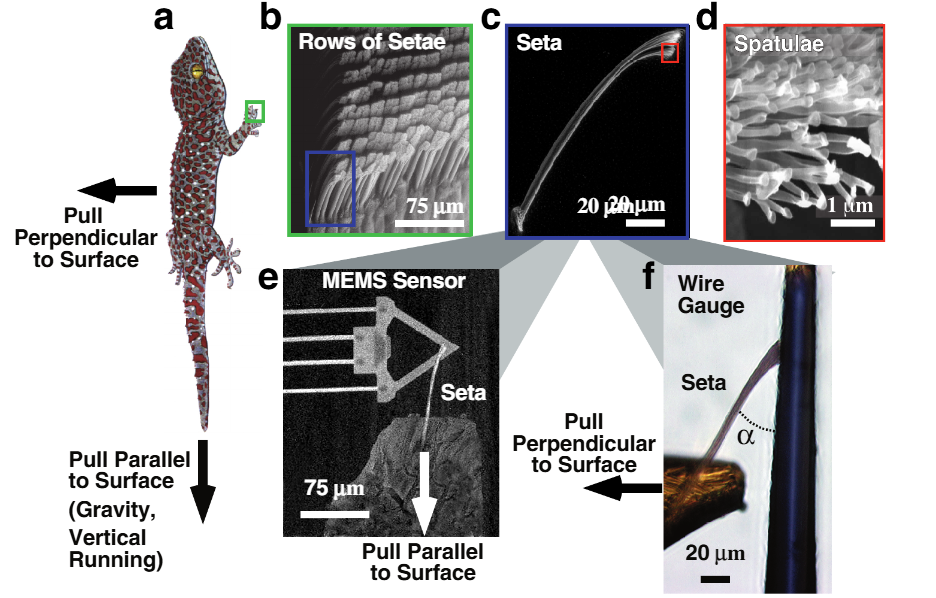
"Para determinar el protocolo de medición de la fuerza de las setas, consideramos el inusualmente complejo comportamiento del gecko al desenrollar los dedos durante la adhesión y el despegado de los dedos durante la separación, análogo a cuando retiramos una cinta adhesiva de una superficie. El exquisito control del dedo nos permitió descubrir aspectos novedosos de la función de las setas, sugiriendo que la orientación y la carga aplicada podrían ser factores cruciales para su capacidad adhesiva.
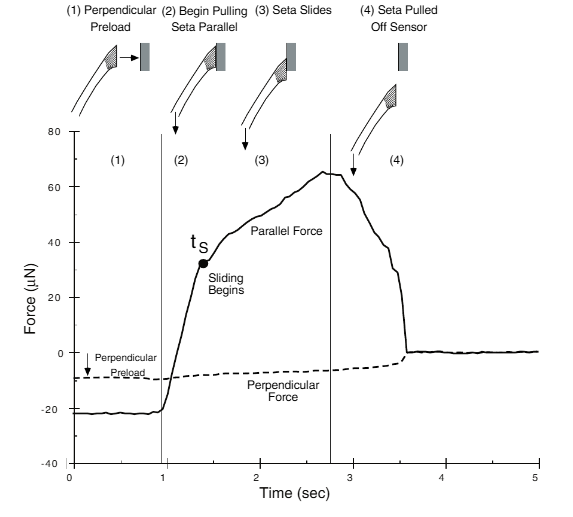
La fuerza de las setas dependía, en efecto, de la orientación tridimensional (espátulas orientadas hacia o en sentido opuesto a la superficie) y del grado de precarga aplicado al pelo plantar (empujado contra la superficie y posteriormente arrastrado a lo largo de ella) durante el contacto inicial. El contacto de la superficie con la seta en una dirección distinta de aquella en la que las espátulas proyectaban hacia la superficie produjo fuerzas inferiores a 0,3 μN cuando la seta se traccionaba perpendicularmente a la superficie. En contraste, cuando la región espatular activa estaba orientada hacia la superficie, la fuerza aumentaba de forma considerable. Tras un empuje inicial hacia la superficie, que denominamos precarga perpendicular, la seta era traccionada paralelamente a la superficie."
Crédito: https://www.researchgate.net/publication/12455123_Adhesive_Force_of_a_Single_Gecko_Foot-Hair
La fuerza adhesiva de la seta, paralela a la superficie, aumentó de forma continua hasta que la seta comenzó a deslizarse fuera del borde del sensor. Crédito: https://www.researchgate.net/publication/12455123_Adhesive_Force_of_a_Single_Gecko_Foot-Hair
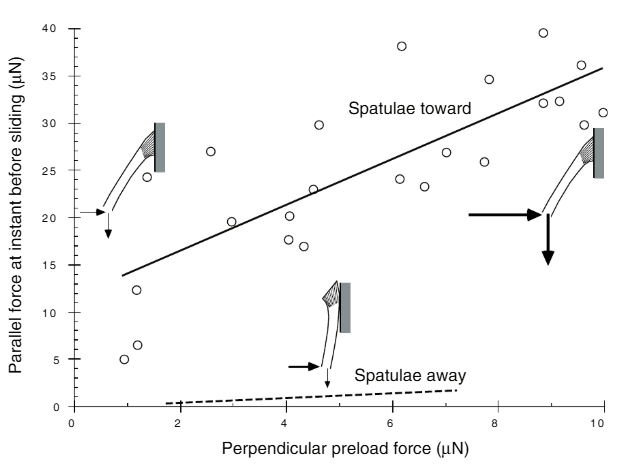
La fuerza de la seta paralela a la superficie aumentó linealmente con la fuerza de precarga perpendicular y fue sustancialmente mayor que la fuerza generada por la región inactiva no espatular en todos los niveles de precarga. Crédito: https://www.researchgate.net/publication/12455123_Adhesive_Force_of_a_Single_Gecko_Foot-Hair
La observación de este sistema natural ha impulsado numerosas investigaciones en materiales adhesivos secos. Los materiales sintéticos intentan reproducir la micro- o nano-estructura fibrilar de las patas del gecko mediante polímeros, micro-pilares o nanotubos de carbono, generando superficies con gran área de contacto y alta adherencia reversible.
Existen ya cintas adhesivas experimentales y comerciales que no dejan residuos, pueden reutilizarse muchas veces manteniendo su capacidad de adherencia y además funcionan sobre múltiples tipos de superficies gracias a su estructura. De hecho, investigadores del MIT han creado un apósito adhesivo impermeable inspirado en los lagartos gecko que pronto podría sumarse a las suturas y grapas como herramienta básica en quirófanos para reparar heridas quirúrgicas o lesiones internas. Crédito: https://news.mit.edu/2008/adhesive-0218
BionicANTs: cooperación biomimética para los sistemas productivos del futuro
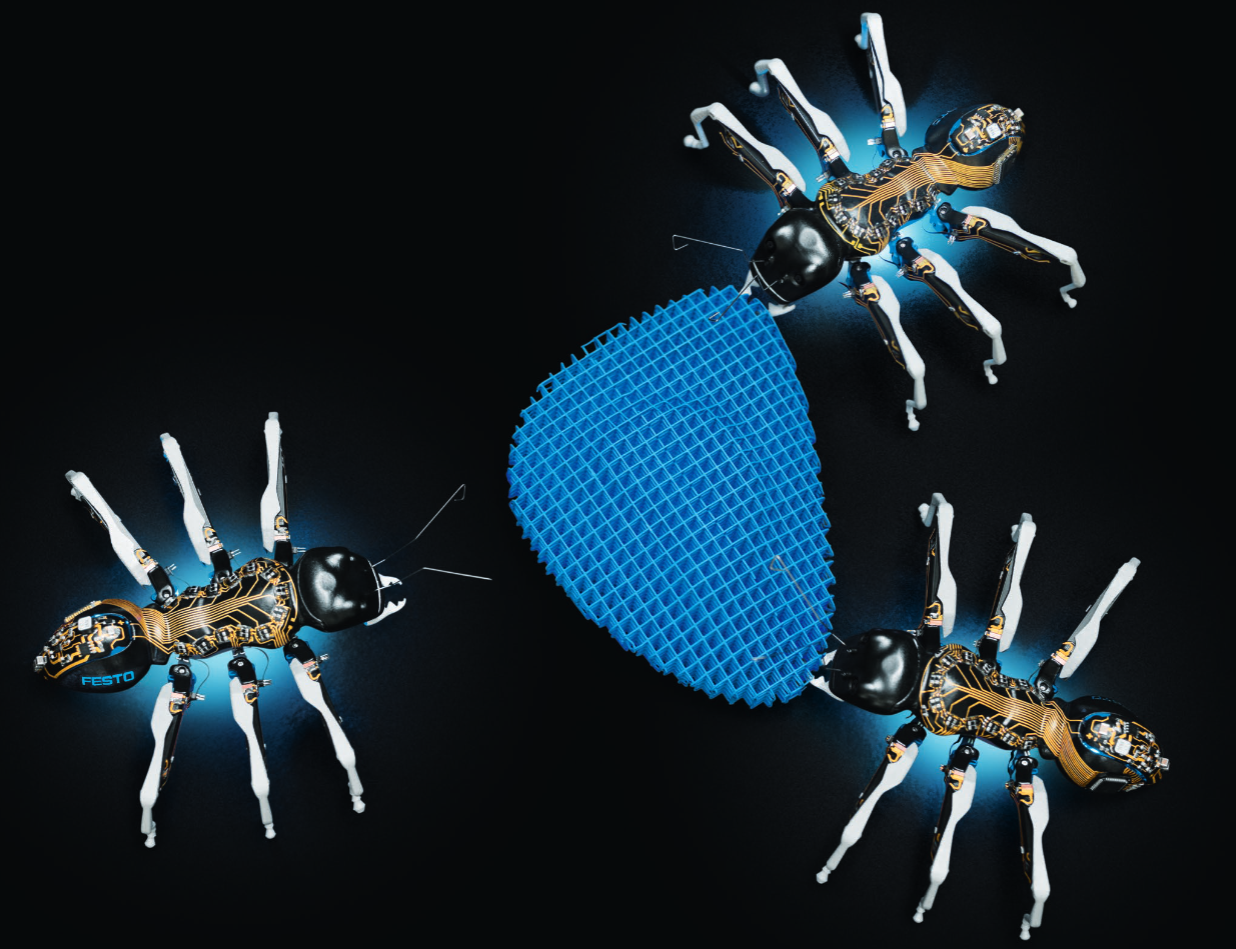
Los ingenieros de Festo desarrollaron el proyecto BionicANTs inspirándose no solo en la anatomía detallada de las hormigas reales, sino también en su comportamiento colectivo. Por primera vez, el principio de cooperación distribuida característico de estos insectos fue trasladado al ámbito tecnológico mediante algoritmos avanzados de control.
Al igual que sus equivalentes biológicos, las hormigas artificiales operan siguiendo reglas comunes bien definidas: intercambian información, coordinan sus movimientos y sincronizan sus acciones. Cada unidad toma decisiones de forma autónoma, pero siempre orientada hacia un objetivo colectivo, contribuyendo así a la resolución de la tarea global.
Inspiración para la producción industrial del futuro
Este tipo de cooperación descentralizada constituye un modelo prometedor para las fábricas del mañana. Los sistemas productivos emergentes tenderán a basarse en componentes inteligentes capaces de adaptarse dinámicamente a distintos escenarios de fabricación, asumiendo funciones que actualmente dependen de sistemas de control centralizados. Las BionicANTs ilustran cómo múltiples unidades independientes pueden reaccionar a situaciones variables, comunicarse entre sí y funcionar como un sistema interconectado. Mediante acciones coordinadas de empuje y tracción, estas hormigas robóticas son capaces de transportar objetos a lo largo de trayectorias definidas, demostrando que la división inteligente del trabajo permite mover cargas que una sola unidad no podría manipular.
Integración funcional en espacios extremadamente reducidos
Además del comportamiento cooperativo, el proceso de fabricación de estas hormigas artificiales representa una innovación tecnológica relevante. Los componentes estructurales se producen mediante sinterizado láser y posteriormente se incorporan circuitos eléctricos visibles utilizando la tecnología 3D MID (dispositivos moldeados con interconexiones tridimensionales). De esta manera, las superficies de las piezas cumplen simultáneamente funciones estructurales y eléctricas, permitiendo integrar todos los sistemas técnicos directamente en el cuerpo del robot. Gracias a esta arquitectura distribuida, no es necesario un sistema de control externo permanente, aunque los parámetros operativos pueden supervisarse y ajustarse inalámbricamente en tiempo real.
Diseño mecánico inspirado en la anatomía natural
La fidelidad al modelo biológico también se refleja en la configuración mecánica. El sistema de agarre reproduce con gran precisión la morfología de las mandíbulas de una hormiga real. El movimiento de cierre se genera mediante actuadores piezocerámicos de flexión integrados en la estructura de la pinza. Al aplicar tensión eléctrica a estos elementos, se produce una deformación controlada que se transmite mecánicamente a las mandíbulas, permitiendo sujetar objetos con gran precisión.
Uso de tecnología piezoeléctrica en locomoción
Las ventajas de la tecnología piezoeléctrica se aprovechan también en las patas del robot. Estos actuadores destacan por su elevada precisión de control, rapidez de respuesta, bajo consumo energético y reducido desgaste mecánico. Cada pata incorpora tres transductores piezocerámicos trimorfos que funcionan simultáneamente como actuadores y elementos estructurales. El actuador superior eleva la pata, mientras que los inferiores permiten su desplazamiento hacia delante y hacia atrás. Para compensar la limitada amplitud de movimiento típica de estos dispositivos, los ingenieros desarrollaron un sistema de articulación flexible que amplifica la longitud de cada paso.
Control distribuido y sistemas multiagente
Cada hormiga robótica dispone de dos baterías recargables que permiten aproximadamente cuarenta minutos de funcionamiento autónomo antes de conectarse automáticamente a una estación de carga mediante sus antenas. El comportamiento colectivo se basa en un conjunto de reglas distribuidas previamente diseñadas mediante modelado matemático y simulaciones computacionales. Este enfoque define un sistema multiagente sin jerarquías centralizadas, en el que todas las unidades contribuyen conjuntamente al proceso de toma de decisiones. El intercambio de información necesario para la coordinación se realiza mediante módulos de comunicación por radio integrados en el cuerpo del robot.
Percepción del entorno y navegación autónoma
El sistema sensorial combina varias tecnologías. Una cámara estereoscópica tridimensional situada en la cabeza permite reconocer objetos y estimar la posición del robot mediante referencias visuales del entorno. Paralelamente, un sensor optoelectrónico localizado en el abdomen detecta los patrones del suelo para determinar el desplazamiento relativo respecto a la superficie. La combinación de ambos sistemas garantiza una localización precisa incluso en condiciones de visibilidad limitada.
Transferencia tecnológica del comportamiento social de las hormigas
Las hormigas reales son capaces de transportar cargas muy superiores a su propio peso y de ejecutar tareas complejas gracias a la cooperación organizada dentro de la colonia. Inspirándose en estos principios, el proyecto BionicANTs demuestra cómo sistemas artificiales autoorganizados pueden comunicarse, coordinarse y resolver tareas complejas como una red funcional integrada. Este enfoque representa una de las direcciones más prometedoras de la robótica biomimética y de los sistemas de producción distribuidos del futuro, donde la inteligencia colectiva de múltiples unidades autónomas sustituirá progresivamente a los modelos de control centralizado tradicionales.
En cada hormiga robot se combinan en un espacio muy reducido numerosos componentes, tecnologías y funciones. Crédito: https://www.festo.com/mx/es/e/sobre-festo/investigacion-y-desarrollo/bionic-learning-network/robots-bionicos-que-caminan/bionicants-id_33396/
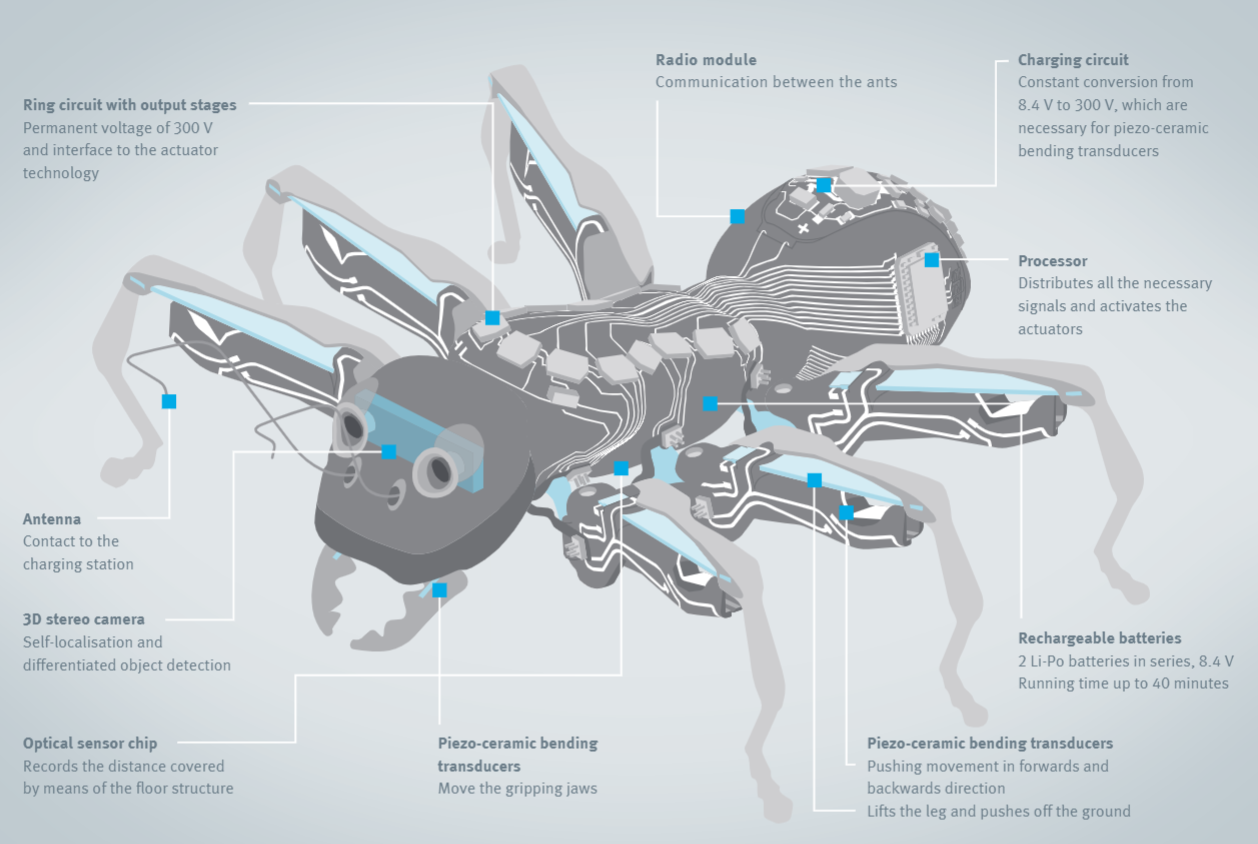
| Component (English) | Componente (Español) | Función principal | Principio tecnológico |
|---|---|---|---|
| Ring circuit with output stages | Circuito en anillo con etapas de salida | Proporciona un voltaje permanente de 300 V e interfaz con los actuadores | Electrónica de potencia y adaptación de señal |
| Radio module | Módulo de radio | Permite la comunicación entre las hormigas robóticas | Comunicación inalámbrica distribuida |
| Charging circuit | Circuito de carga | Convierte continuamente 8,4 V en 300 V para alimentar los actuadores piezocerámicos | Conversión electrónica de potencia DC-DC |
| Processor | Procesador | Distribuye señales de control y activa los actuadores | Control embebido y sistemas distribuidos |
| Rechargeable batteries | Baterías recargables | Suministro energético autónomo (hasta 40 min de operación) | Almacenamiento electroquímico de energía |
| Piezo-ceramic bending transducers (legs) | Transductores piezocerámicos de flexión (patas) | Generan el movimiento de elevación y desplazamiento de las patas | Actuación piezoeléctrica de alta precisión |
| Piezo-ceramic bending transducers (gripping jaws) | Transductores piezocerámicos de flexión (mandíbulas) | Accionan el sistema de agarre | Actuación piezoeléctrica |
| Optical sensor chip | Chip sensor óptico | Determina el desplazamiento relativo respecto al suelo | Sensado optoelectrónico de movimiento |
| 3D stereo camera | Cámara estereoscópica 3D | Autolocalización y reconocimiento de objetos | Visión artificial tridimensional |
| Antenna | Antena | Permite la conexión con la estación de carga | Interfaz eléctrica de recarga |
Otros ejemplos de diseños biomiméticos de Festo

Recursos:



https://www.researchgate.net/publication/220058882_Termites_as_models_of_swarm_cognition
https://www.researchgate.net/publication/12455123_Adhesive_Force_of_a_Single_Gecko_Foot-Hair
https://www.damtp.cam.ac.uk/user/gold//pdfs/teaching/old_literature/HodgkinHuxley.pdf