Jamming biológico: simulando la batalla ultrasónica entre polillas y murciélagos
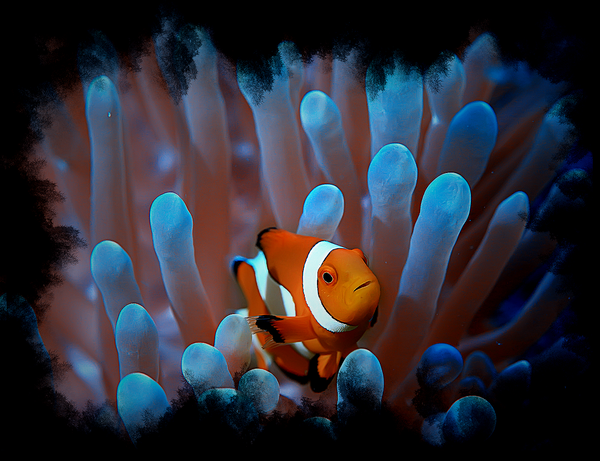
Como vimos en el artículo anterior sobre jamming biológico, algunas polillas no se limitan a huir: han desarrollado contramedidas acústicas capaces de degradar el “radar” natural de los murciélagos, su ecolocalización. El caso más estudiado es el de Bertholdia trigona, una polilla tigre que, durante el ataque final del depredador, emite ráfagas de clics ultrasónicos en la misma banda de frecuencia que usa el murciélago para “iluminar” el blanco.
La clave está en el momento. Cuando el murciélago entra en el terminal buzz (una fase de pulsos muy rápidos para refinar distancia y dirección) la polilla responde en decenas de milisegundos activando sus timbales, membranas torácicas tensas accionadas por músculos de contracción rápida. El resultado es una lluvia de clics que contamina el canal de retorno de los ecos: el murciélago recibe señales adicionales que compiten con el eco real y pueden introducir ambigüedad en la estimación basada en tiempo de vuelo e intensidad.
En ensayos controlados, esta interferencia se ha asociado con una caída drástica del éxito de captura (del orden del 70–80% de fallos), mientras que al “silenciar” la polilla el rendimiento del murciélago vuelve a valores esperables. La defensa, además, no es continua: la polilla la reserva para el instante crítico, maximizando eficacia y minimizando coste energético.
A continuación se muestran dos vídeos que muestran la capacidad evasiva de la polilla cuando recurre a técnicas de jamming:
- Video de como una polilla silenciada no logra evadir el ataque de un murciélago:
- Video de como una polilla tigre logra evadir el ataque de un murciélago gracias al jamming:
Este mecanismo es un ejemplo extraordinario de coevolución depredador–presa: una defensa activa que no solo dificulta la huida, sino que degrada directamente la información sensorial con la que el depredador guía el ataque.
Pero aquí viene la pregunta cuantitativa: ¿cómo se traduce exactamente ese “ruido” en un error de localización? En este artículo construimos un modelo físico y numérico —una onda acústica con fuentes (emisión, eco y jamming) y una lectura por correlación— para estimar cuándo la interferencia apenas degrada el rango y cuándo genera picos falsos capaces de desplazar la posición “percibida” del objetivo.
Si quieres el contexto biológico completo y la evidencia experimental, lo tienes desarrollado en el artículo anterior (enlazado a continuación).

Aquí, en cambio, el objetivo no es documentar el hecho y relatar el modelo biológico, sino modelizarlo de forma conceptual: traducir el jamming a un problema físico (ondas + fuentes) y ver cómo puede convertirse en error de distancia/posición cuando el murciélago estima el blanco a partir del tiempo de retorno de los ecos.
Objetivo de la simulación
El objetivo es desarrollar un modelo matemático conceptual de la interferencia ultrasónica (jamming acústico) en la interacción depredador-presa entre murciélagos ecolocalizadores y polillas capaces de emitir señales disruptivas, con el fin de analizar cómo la señal interferente generada por la polilla modifica la estimación de posición obtenida por el murciélago y, en consecuencia, la probabilidad de captura.
Para ello, se propone formular un modelo basado en la ecuación de onda acústica con términos de fuente múltiples, que incluya:
- (i) la señal de ecolocalización emitida por el murciélago,
- (ii) el eco reflejado por la polilla y
- (iii) una señal pulsada adicional asociada al mecanismo de jamming producido por la propia polilla.
Sobre esta base, se realizará la discretización numérica del sistema, el análisis de estabilidad y convergencia del esquema empleado, y la simulación de distintos escenarios de intensidad y temporización del jamming.
Finalmente, a partir de los campos acústicos simulados, se evaluará cualitativamente el error en la localización estimada de la presa —comparando posición real frente a posición percibida— y se representarán gráficamente configuraciones características del fenómeno, permitiendo discutir el papel del jamming biológico como estrategia evolutiva en la carrera armamentística murciélago-polilla.
Planteamiento físico del problema
Propagación del sonido en un medio unidimensional
La propagación del sonido en un medio homogéneo unidimensional puede describirse, bajo la aproximación lineal de pequeñas perturbaciones, mediante la ecuación de onda acústica para la presión acústica p(x,t):
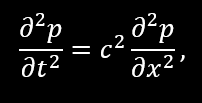
donde c representa la velocidad de propagación del sonido en el medio (aire, en el caso de la interacción murciélago–polilla), determinada por las propiedades termodinámicas del fluido.
Esta ecuación se obtiene al combinar las ecuaciones linealizadas de continuidad, cantidad de movimiento (Euler) y estado, suponiendo perturbaciones pequeñas respecto al estado de equilibrio del medio. Bajo estas hipótesis, el campo acústico puede interpretarse como una superposición de ondas progresivas que se desplazan en direcciones opuestas:

donde f y g representan ondas que se propagan respectivamente hacia la derecha y hacia la izquierda.
En situaciones físicas reales, especialmente en propagación atmosférica de ultrasonidos, aparecen mecanismos disipativos asociados a viscosidad, relajación térmica y absorción molecular. Estos efectos pueden modelarse introduciendo un término de amortiguamiento proporcional a la derivada temporal.
El modelo unidimensional constituye una primera aproximación que permite analizar de forma controlada la interacción temporal entre señal emitida, eco y señal interferente, estudiar el error en la estimación de distancia mediante tiempo de vuelo, y evaluar preliminarmente el impacto de la interferencia acústica antes de extender el planteamiento a configuraciones bidimensionales más realistas.
Idealización del sistema murciélago–polilla
Con el fin de construir un modelo matemático tratable que permita estudiar el fenómeno de interferencia ultrasónica, el sistema real murciélago–polilla se idealiza mediante una serie de hipótesis simplificadoras que capturan los mecanismos físicos esenciales del proceso de ecolocalización y jamming acústico.
En primer lugar, el medio de propagación se considera homogéneo, isótropo y en reposo, con propiedades constantes (densidad, temperatura y velocidad del sonido), de modo que la propagación acústica pueda describirse mediante la ecuación de onda lineal con amortiguamiento. Asimismo, se supone que las perturbaciones acústicas son de pequeña amplitud, lo que justifica el uso de la aproximación lineal.
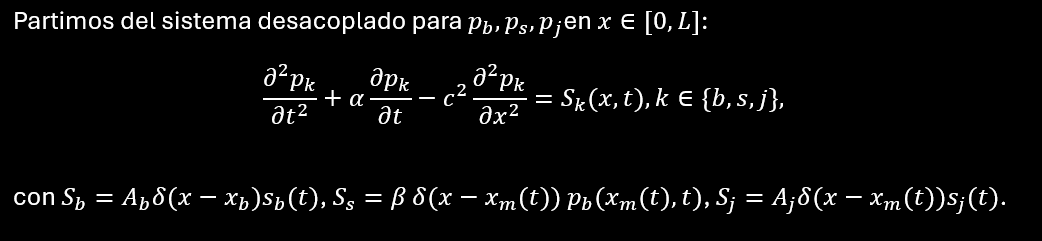
El murciélago se modela como una fuente puntual emisora situada en una posición fija xb, que emite pulsos ultrasónicos de duración corta representados mediante una función temporal modulada:

donde Ab es la amplitud de emisión, δ la función delta de Dirac y sb la señal pulsada característica de ecolocalización.
La polilla se representa como un dispersor puntual móvil localizado en xm (t). Este dispersor genera dos contribuciones acústicas diferenciadas:
- Eco acústico: respuesta pasiva debida a la reflexión parcial de la señal incidente del murciélago, cuya intensidad depende del coeficiente de dispersión acústica del insecto.
- Señal activa de interferencia (jamming): emisión ultrasónica propia de la polilla, modelada como una fuente adicional pulsada,

donde Aj y sj (t) representan la amplitud y la modulación temporal del jamming.
En esta idealización, el receptor auditivo del murciélago se considera co-localizado con la fuente emisora (configuración monostática), de modo que la estimación de la posición de la polilla se basa en el tiempo de vuelo de las señales recibidas, compuesto por la contribución del eco real y por las perturbaciones introducidas por la señal interferente.
Finalmente, se supone que la dinámica espacial del problema puede analizarse inicialmente en una geometría unidimensional, en la que murciélago y polilla se encuentran alineados en el eje de propagación acústica. Esta aproximación permite estudiar de manera clara la interacción temporal entre señal emitida, eco y jamming, evaluar el error en la distancia estimada y establecer las bases del modelo antes de su extensión a configuraciones bidimensionales más realistas donde la interferencia produce errores direccionales en la localización.
Modelo matemático
Ecuación de onda amortiguada
En el contexto del modelo murciélago–polilla, la propagación de las señales ultrasónicas en el aire puede describirse mediante la ecuación de onda acústica amortiguada con términos de fuente, que incorpora tanto la disipación energética del medio como las emisiones acústicas del sistema:

De acuerdo con la idealización introducida anteriormente, el término de fuente puede expresarse como la superposición de contribuciones asociadas al proceso de ecolocalización:

incluyendo:
- la señal ultrasónica emitida por el murciélago,
- la señal reflejada por la polilla (eco),
- la señal activa de interferencia generada por la polilla (jamming).
La presencia del término disipativo:

introduce una atenuación progresiva de la amplitud de las ondas acústicas, lo que resulta especialmente relevante en ultrasonidos atmosféricos, donde las pérdidas por absorción aumentan con la frecuencia. Este efecto condiciona tanto la intensidad del eco recibido por el murciélago como la eficacia relativa del jamming, ya que ambas señales experimentan atenuación durante su propagación.
Esta formulación constituye la base matemática del modelo, sobre la cual se aplicarán posteriormente los procesos de discretización numérica, análisis de estabilidad y simulación de distintos escenarios de emisión y respuesta interferente, con el objetivo de evaluar el error inducido en la localización acústica de la presa.
Definición del término fuente
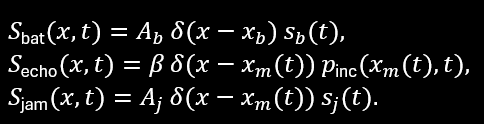
El término de fuente S (x,t) representa las emisiones acústicas activas y las contribuciones generadas por la interacción onda–dispersor dentro del sistema murciélago–polilla. En el marco de la idealización adoptada, puede escribirse como la superposición de tres componentes principales:

- Emisión del murciélago
El murciélago se modela como una fuente puntual situada en la posición xb , que emite pulsos ultrasónicos modulados temporalmente:

- Eco en la polilla
La polilla se modela como un dispersor puntual localizado en xm (t). La señal incidente procedente del murciélago genera una señal reflejada cuya intensidad depende del coeficiente efectivo de dispersión acústica. De forma simplificada, esta contribución puede representarse como:

donde pinc es la presión acústica incidente evaluada en la posición instantánea de la polilla. Este término introduce el mecanismo de retrodispersión responsable de la detección mediante tiempo de vuelo.
- Jamming de la polilla
Además del eco pasivo, la polilla puede emitir activamente pulsos ultrasónicos destinados a interferir con el sistema de ecolocalización del murciélago. Esta contribución se modela como una fuente puntual adicional:


En cierto modo, el campo acústico resultante en el receptor del murciélago será la superposición de la señal reflejada real y de la señal interferente emitida por la polilla, lo que permitirá evaluar en etapas posteriores del modelo el error inducido en la estimación de posición y analizar la eficacia del jamming biológico bajo diferentes configuraciones de intensidad, temporización y distancia relativa entre emisor y presa.
- Forma final del sistema de ecuaciones
Considerando medio homogéneo, acústica lineal y amortiguamiento, el campo de presión acústica quedaría gobernado por la ecuación de onda amortiguada con fuentes:

con:
sea el dominio espacial

Descomponemos la presión acústica total como:

donde:

1) Campo incidente del murciélago

2) Campo dispersado (eco) de la polilla

(la polilla “ve” solo el campo incidente del murciélago, no el propio jamming).
Entonces:

3) Campo de jamming emitido por la polilla

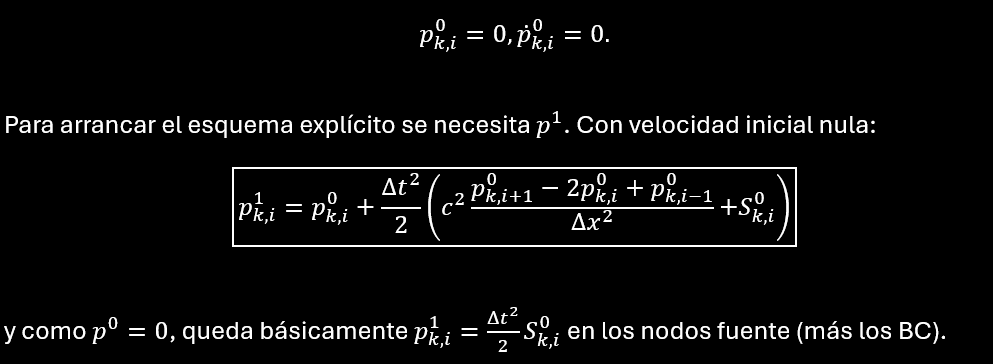
Condiciones iniciales
Con tal de no añadir más ruido (nunca mejor dicho), asumimos por simplicidad silencio inicial:

Condiciones de contorno (dominio finito)
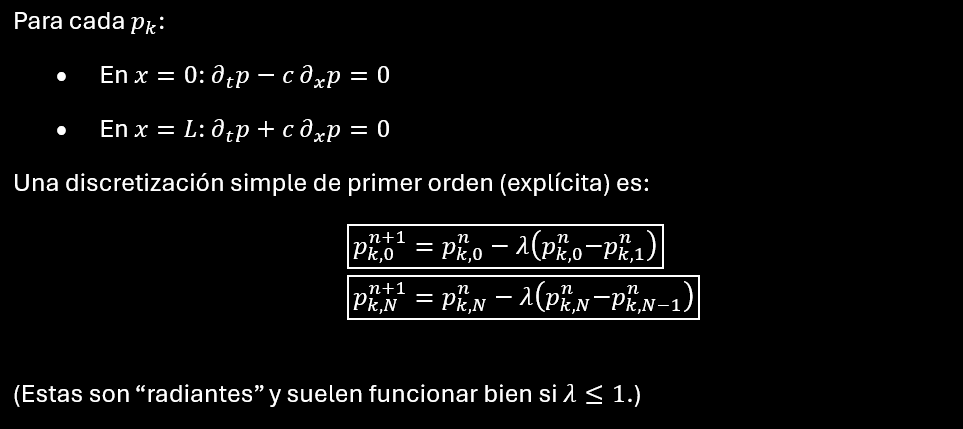
Para evitar que el dominio finito introduzca reflexiones no físicas, se emplean condiciones radiantes/absorbentes (Sommerfeld de primer orden) en ambos extremos, aplicadas a cada subcampo:
En x=0:
En x=L:
(El signo cambia porque en x=0 “sale” hacia la izquierda y en x=L “sale” hacia la derecha.)
Señal recibida por el murciélago (observable)
Si el receptor está co-localizado con el emisor en xb , la señal que “escucha” es:
Modelado del movimiento de la polilla y de las señales acústicas
Para completar el modelo, es necesario especificar la dinámica de la posición de la polilla xm (t) y la forma funcional de las señales emitidas por murciélago y polilla.
- Movimiento de la polilla
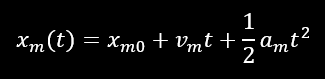
En una primera aproximación, la trayectoria puede modelarse como movimiento rectilíneo uniforme:
Este modelo permite estudiar directamente el error de estimación de distancia en función del tiempo. En etapas posteriores puede introducirse una maniobra evasiva:
o trayectorias segmentadas (cambio brusco de dirección).
- Señal de ecolocalización del murciélago
Los murciélagos emiten típicamente bursts ultrasónicos modulados. Un modelo estándar es un tono sinusoidal con envolvente gaussiana:
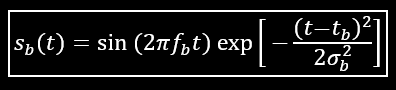
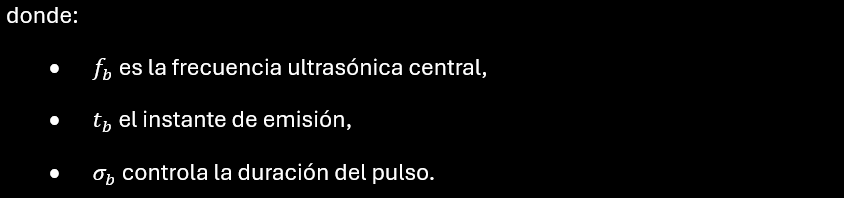
- Señal de jamming emitida por la polilla
La polilla suele emitir trenes de pulsos cortos que interfieren con la señal recibida. Se puede modelar como:
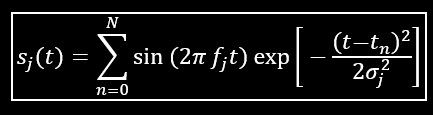
La densidad temporal de estos pulsos constituye el principal parámetro biológico que determina la eficacia de la interferencia.
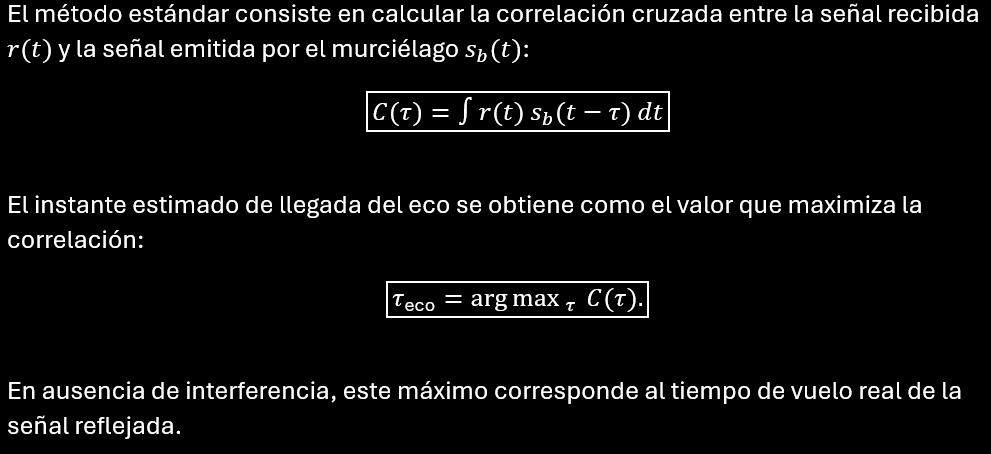
- Señal recibida y estimación de posición
La señal registrada por el murciélago es

y la distancia estimada mediante tiempo de vuelo se obtiene a partir del instante de llegada del eco dominante:
originando un error
Discretización en diferencias finitas y condición de estabilidad (CFL)
Mallado

Aproximaciones estándar:

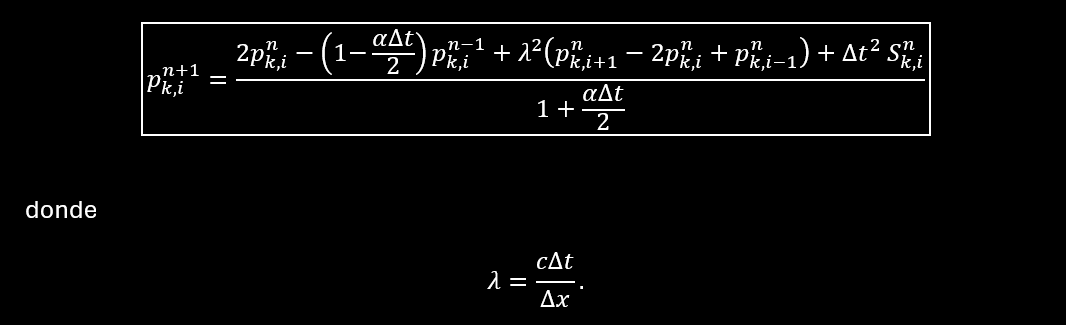
Esquema explícito (interior del dominio)

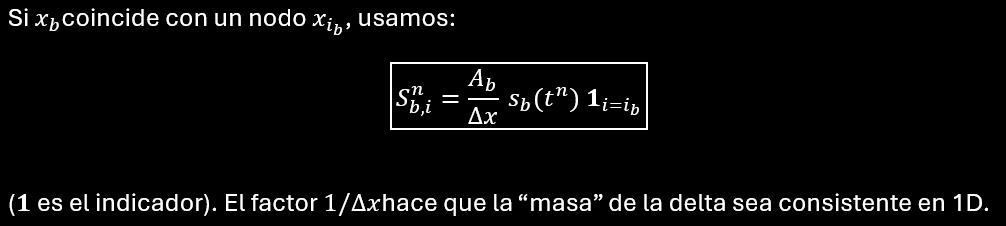
Aproximación discreta de las fuentes (delta de Dirac)
- Fuente del murciélago (fija)
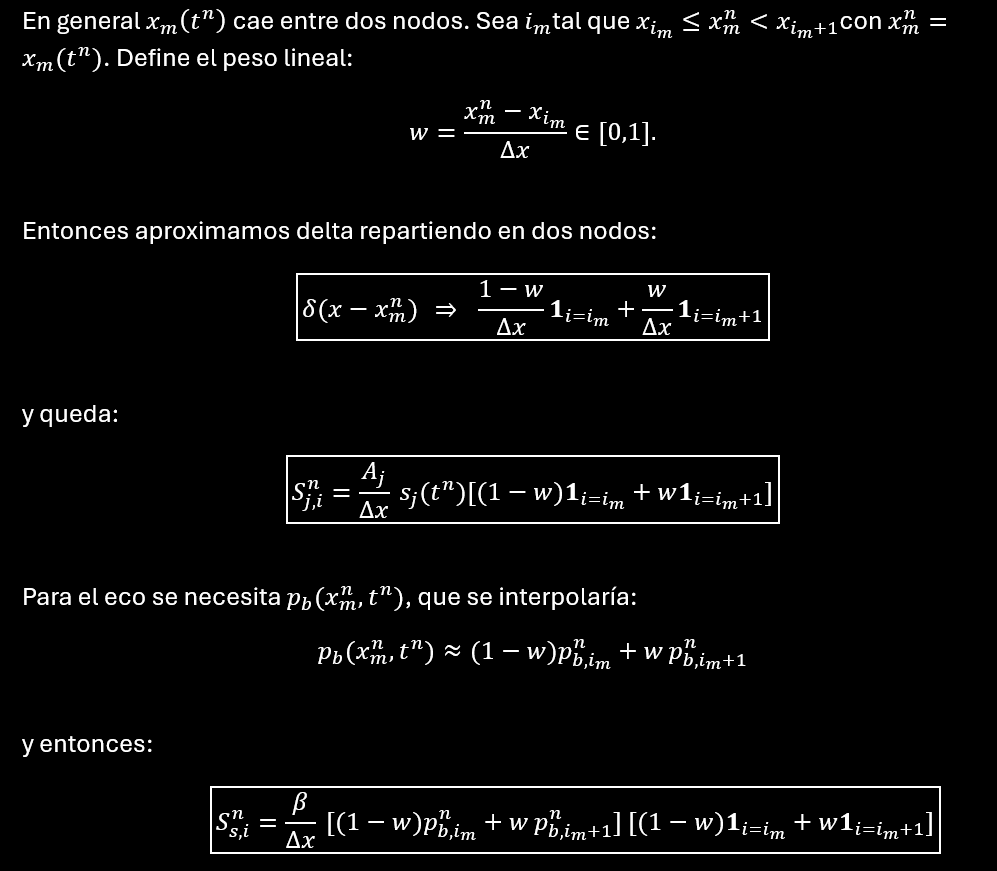
- Fuente de la polilla (móvil)
- Condiciones de contorno absorbentes (Sommerfeld) en forma discreta
- Condiciones iniciales (silencio inicial)
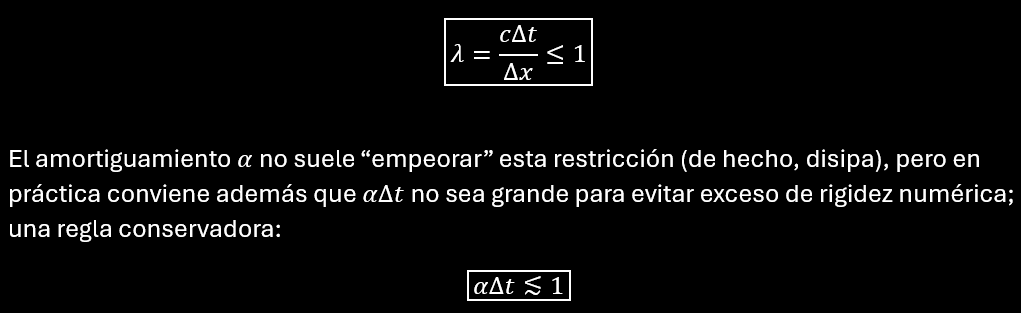
Estabilidad: condición CFL
Para el esquema explícito clásico de la ecuación de onda 1D, la condición típica sería:
Postprocesado
Postprocesado: estimación de la posición mediante tiempo de vuelo
Una vez resuelto numéricamente el sistema de ecuaciones y obtenido el campo de presión total

la señal registrada por el murciélago en su posición xb viene dada por
El objetivo del postprocesado es estimar la distancia a la polilla a partir del tiempo de llegada del eco y evaluar el error inducido por la señal de jamming.
Estimación del tiempo de llegada del eco
Estimación de la distancia
La distancia estimada entre murciélago y polilla se calcula mediante
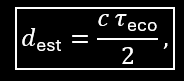
donde el factor 1/2 tiene en cuenta el recorrido de ida y vuelta de la onda acústica.
La distancia real viene dada por
Error inducido por el jamming
La eficacia del jamming puede cuantificarse mediante el error de localización

Dependiendo de la intensidad y temporización de la señal interferente, pueden observarse varios efectos característicos:
- desplazamiento del máximo de correlación (sesgo sistemático),
- aparición de máximos falsos en la correlación (ecos espurios),
- reducción de la relación señal-ruido del eco verdadero,
- pérdida temporal de detección de la presa.
Este procedimiento permite traducir directamente los resultados del modelo acústico en una magnitud funcional relevante desde el punto de vista biológico: la precisión de la estimación espacial del depredador y la reducción de la probabilidad de captura asociada a la interferencia acústica generada por la polilla.
Parámetros físicos
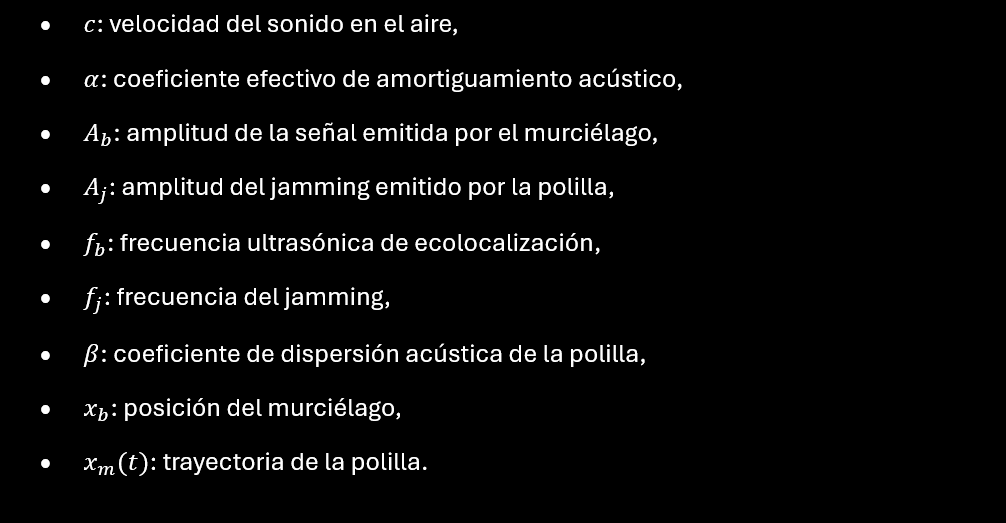
Parámetros físicos principales
El modelo depende de los siguientes parámetros dimensionales:
Parámetros adimensionales relevantes
Para facilitar la comparación entre distintos escenarios, resulta útil introducir parámetros adimensionales que controlan el comportamiento del sistema:
- Relación de amplitudes (intensidad relativa del jamming):
- Relación de frecuencias:
- Número de Courant (control numérico de estabilidad):
- Coeficiente adimensional de amortiguamiento:
- Coeficiente de dispersión adimensional:
(en modelos conceptuales puede considerarse ya adimensional).
Escenarios de simulación propuestos
Se pueden definir distintos regímenes de interés:
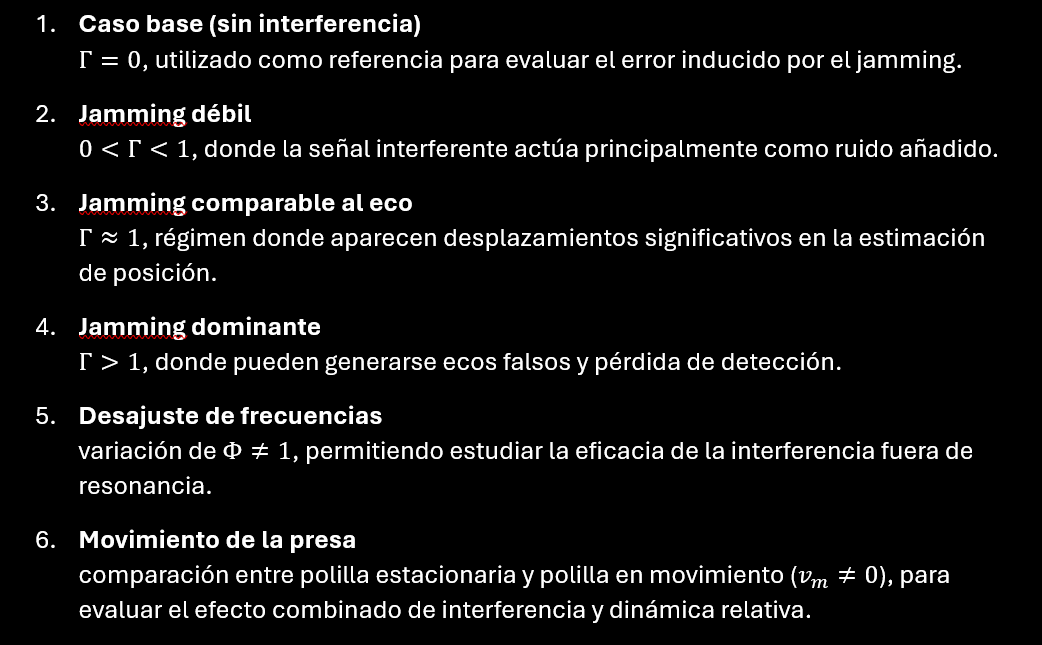
Magnitudes de salida del modelo
Para cada simulación se analizarán:
Parámetros físicos del modelo plasmados en literatura científica
- Frecuencia de ecolocalización del murciélago
La mayoría de los murciélagos insectívoros utilizan señales ultrasónicas en el rango:
aunque el espectro total observado en especies distintas puede variar aproximadamente entre 11 kHz y más de 200 kHz.
Este rango determina la longitud de onda acústica característica del modelo:
(lo cual fija también la resolución espacial mínima que debería tener la discretización numérica).
- Frecuencia del jamming emitido por la polilla
Las polillas que realizan interferencia activa producen clics ultrasónicos con energía concentrada típicamente en:
intervalo que coincide con el rango de sensibilidad auditiva de muchos murciélagos.
Estudios globales muestran además que muchas señales anti-murciélago se centran aproximadamente en torno a 65 kHz, con variaciones de ~40 a 110 kHz.
Esto justifica que en el modelo se analicen escenarios:
- Intensidad relativa de las señales (amplitud)
Las interacciones experimentales demuestran que el jamming es eficaz cuando la señal de la polilla alcanza intensidades comparables al eco recibido por el murciélago, reduciendo significativamente la tasa de captura.
Por ello es razonable estudiar numéricamente:
cubriendo desde ausencia de interferencia hasta jamming dominante.
- Duty cycle del jamming (densidad temporal de pulsos)
La eficacia del jamming aumenta con la densidad temporal de los pulsos emitidos por la polilla; experimentos muestran que el incremento del duty cycle reduce la probabilidad de captura.
Esto se modela mediante:
Simulación
Para la simulación se ha recurrido a un programa ejecutado en Python. Funciones del programa:
- Simula el modelo 1D: p = p_b + p_s + p_j con amortiguamiento y BC absorbentes.
- El murciélago emite un tren de pulsos, no solo uno, para poder estimar posición en varios instantes.
- Para cada pulso, estima el retardo del eco mediante correlación cruzada en una ventana temporal.
- Convierte el retardo estimado a distancia y luego a posición estimada x_hat(t_k).
- Repite con y sin jamming, y lo compara.
Notas:
- La estimación es monostática (emisor = receptor), por rango: d = c*tau/2.
- En 1D hay ambigüedad de “lado”; aquí suponemos que la polilla está a la derecha del murciélago (x_m > x_b la mayor parte del tiempo). Si la polilla pudiera cruzar, habría que definir.
A continuación los resultados obtenidos:
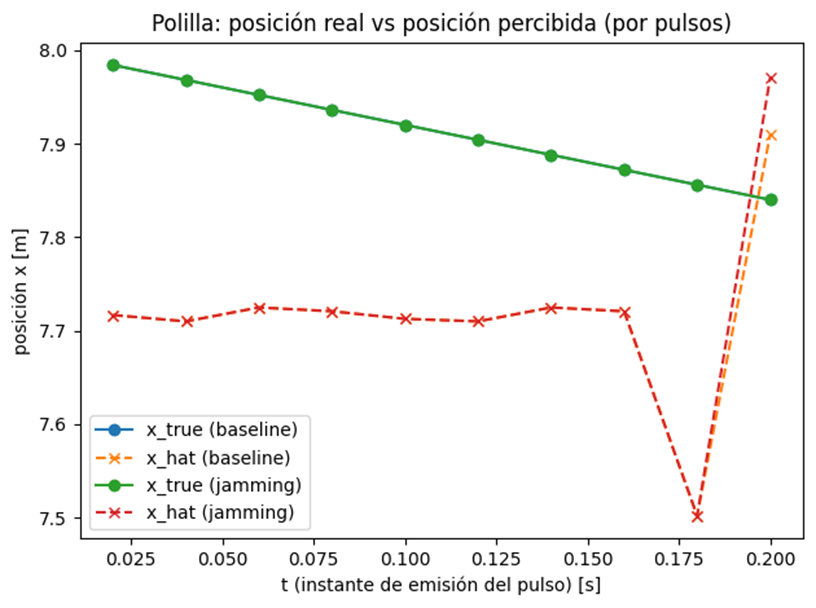
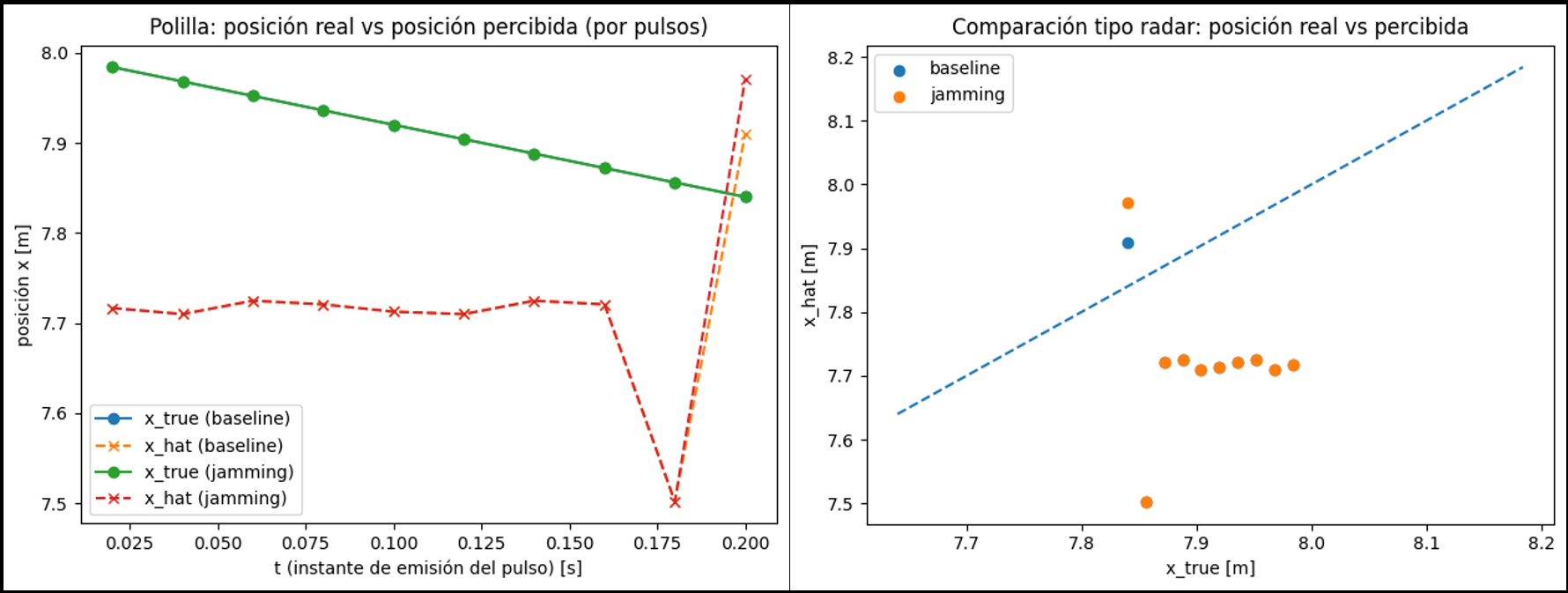
Jamming para Aj =1e6
[Stability/CFL] dx=0.003000 m, dt=7.871720e-06 s, c=343.00 m/s, lambda=0.900000, dt_max=dx/c=8.746356e-06 s, margin(dt_max-dt)=8.746e-07 s
max |r_only_jam|: 0.012288850302539367
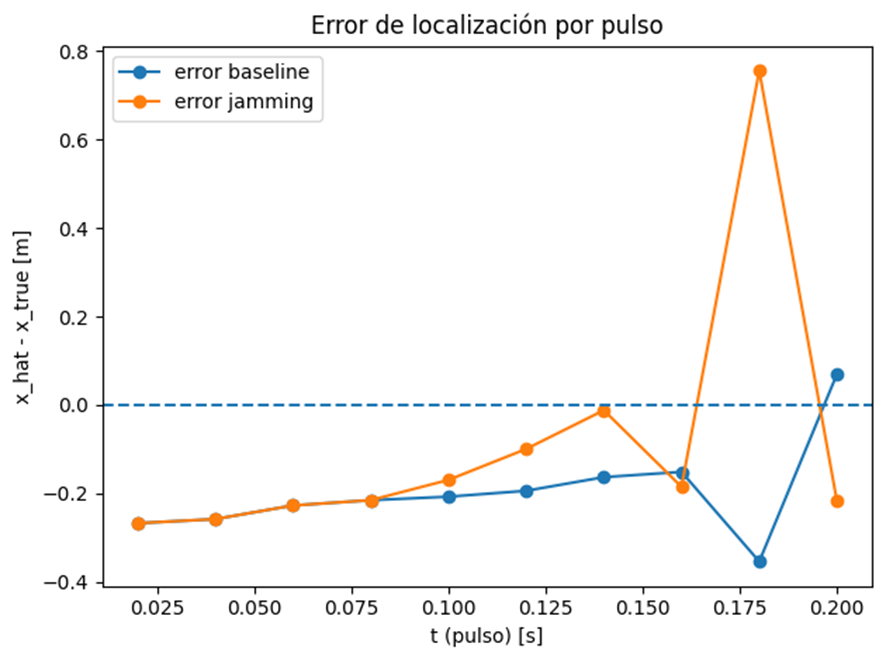
=== Errores por pulso (x_hat - x_true) ===
Baseline: mean=-0.197 m, std=0.104 m
Jamming : mean=-0.111 m, std=0.297 m
Baseline stability: {'dx': 0.003, 'dt': 7.871720116618076e-06, 'lambda_': 0.9, 'dt_max': 8.746355685131195e-06, 'margin_dt': 8.746355685131193e-07, 'CFL': 0.9}
Jamming stability : {'dx': 0.003, 'dt': 7.871720116618076e-06, 'lambda_': 0.9, 'dt_max': 8.746355685131195e-06, 'margin_dt': 8.746355685131193e-07, 'CFL': 0.9}
max |s_j|: 1.0200029483931021
max |r_base|: 0.12214623454805287
max |r_jam| : 0.12214623454805287
max |r_jam - r_base|: 0.01228885030253936
Jamming para Aj =1e4 (más débil)
Si A_j se modifica a un régimen de jamming débil, casi no cambia la estimación de posición del murciélago:
· Baseline: mean = −0.197 m, std = 0.104 m
· Jamming: mean = −0.191 m, std = 0.120 m
Esto evidencia que el jamming deja de influir de forma significativa y el sistema vuelve prácticamente al comportamiento del baseline.
Resultados
[Stability/CFL] dx=0.003000 m, dt=7.871720e-06 s, c=343.00 m/s, lambda=0.900000, dt_max=dx/c=8.746356e-06 s, margin(dt_max-dt)=8.746e-07 s
max |r_only_jam|: 0.00012288850302564488
=== Errores por pulso (x_hat - x_true) ===
Baseline: mean=-0.197 m, std=0.104 m
Jamming : mean=-0.191 m, std=0.120 m
Baseline stability: {'dx': 0.003, 'dt': 7.871720116618076e-06, 'lambda_': 0.9, 'dt_max': 8.746355685131195e-06, 'margin_dt': 8.746355685131193e-07, 'CFL': 0.9}
Jamming stability : {'dx': 0.003, 'dt': 7.871720116618076e-06, 'lambda_': 0.9, 'dt_max': 8.746355685131195e-06, 'margin_dt': 8.746355685131193e-07, 'CFL': 0.9}
max |s_j|: 1.0200029483931021
max |r_base|: 0.12214623454805287
max |r_jam| : 0.12214623454805287
max |r_jam - r_base|: 0.00012288850302564488
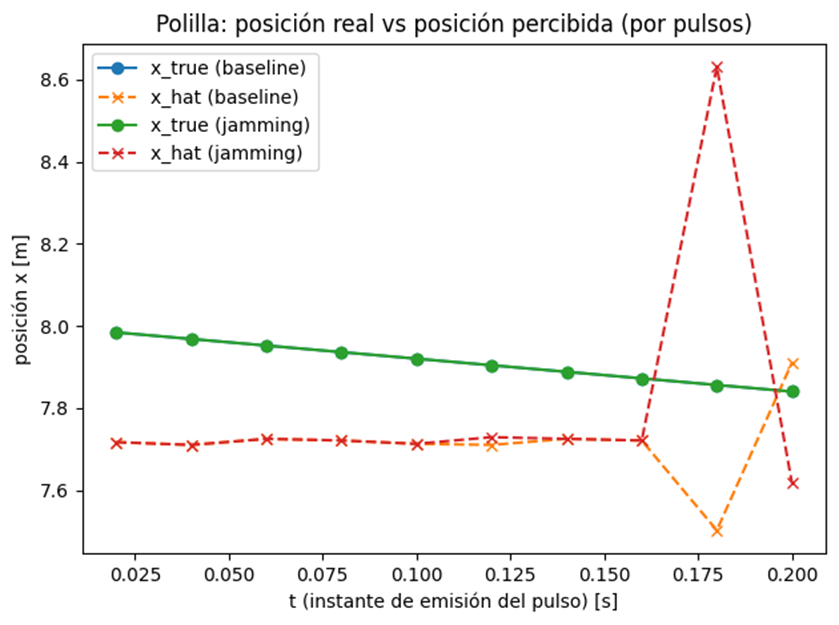
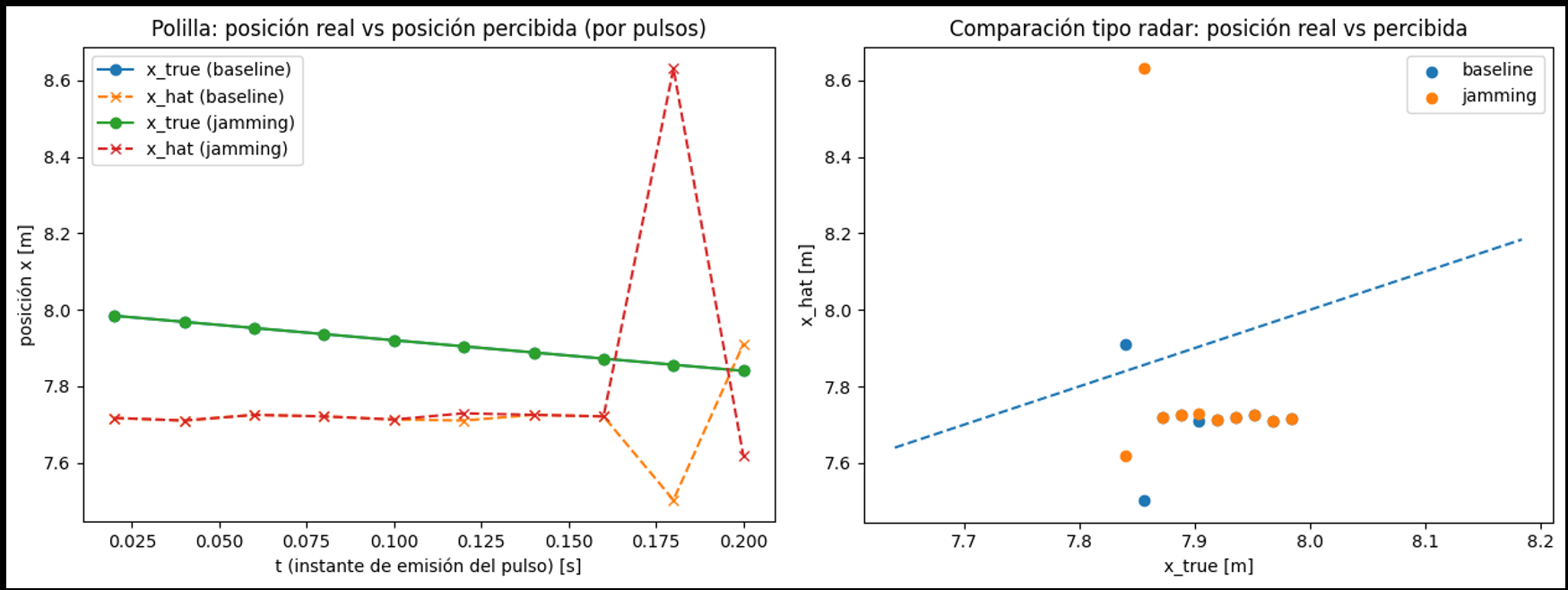
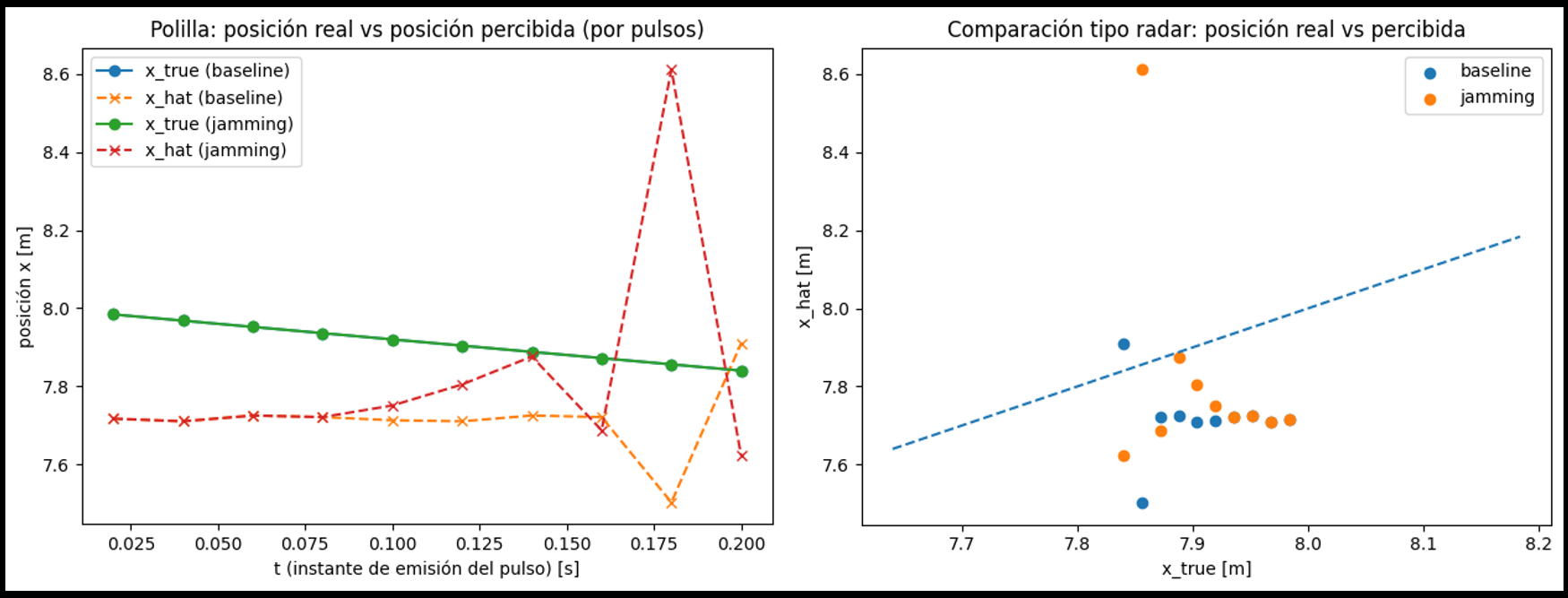
Jamming para Aj =1e7 (más fuerte)
Se ven pulsos donde se mantiene en alrededor de 7.7 m, y de repente:
- aparece un salto a ≈ 8.6 m (sobreestimación fuerte),
- y también un salto a ≈ 7.5 m (subestimación fuerte).

Resultados
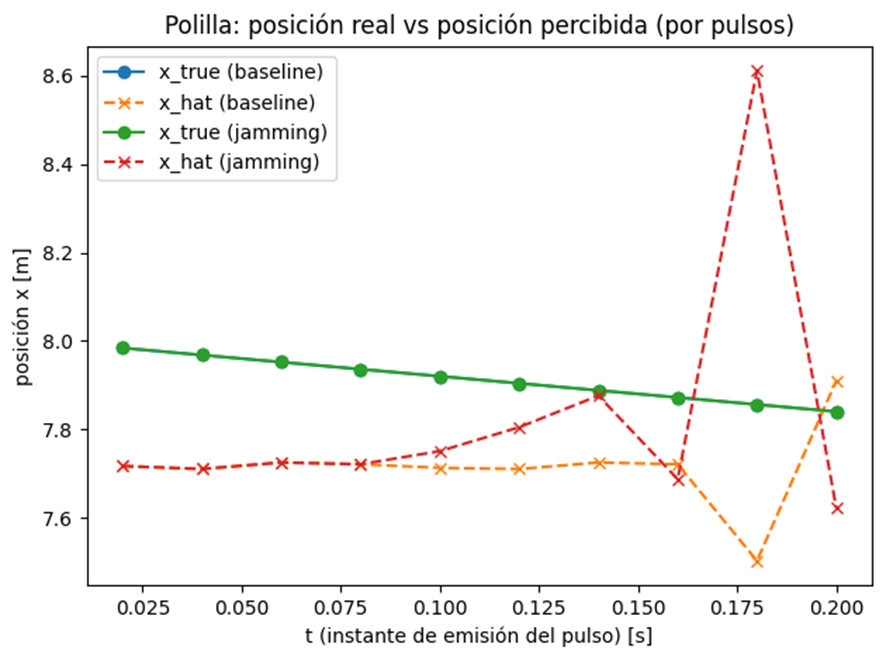
[Stability/CFL] dx=0.003000 m, dt=7.871720e-06 s, c=343.00 m/s, lambda=0.900000, dt_max=dx/c=8.746356e-06 s, margin(dt_max-dt)=8.746e-07 s
max |r_only_jam|: 0.12288850302548819
=== Errores por pulso (x_hat - x_true) ===
Baseline: mean=-0.197 m, std=0.104 m
Jamming : mean=-0.090 m, std=0.291 m
Baseline stability: {'dx': 0.003, 'dt': 7.871720116618076e-06, 'lambda_': 0.9, 'dt_max': 8.746355685131195e-06, 'margin_dt': 8.746355685131193e-07, 'CFL': 0.9}
Jamming stability : {'dx': 0.003, 'dt': 7.871720116618076e-06, 'lambda_': 0.9, 'dt_max': 8.746355685131195e-06, 'margin_dt': 8.746355685131193e-07, 'CFL': 0.9}
max |s_j|: 1.0200029483931021
max |r_base|: 0.12214623454805287
max |r_jam| : 0.15503609055196516
max |r_jam - r_base|: 0.12288850302548819
Comparativa
Aj=1e4
Aj=1e6
Aj=1e7
Conclusiones
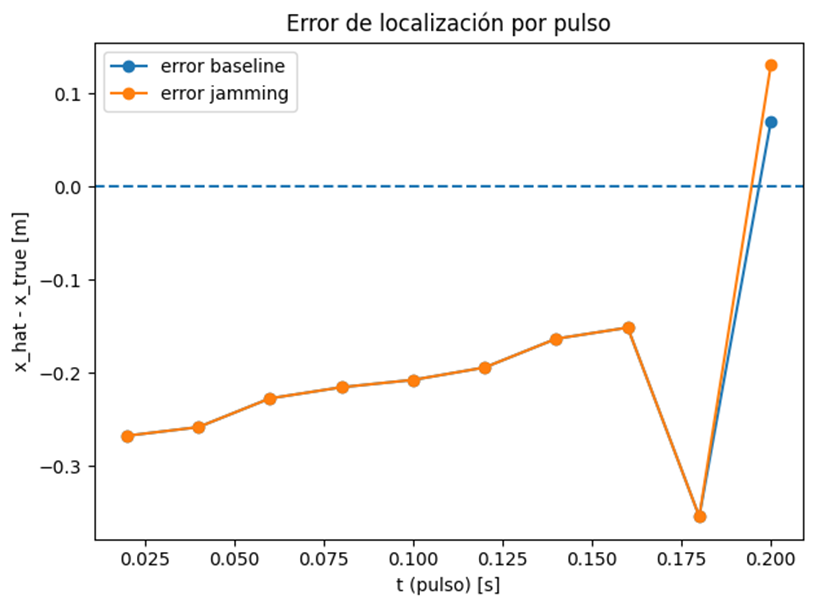
1) El baseline es “estable” y el sesgo es sistemático
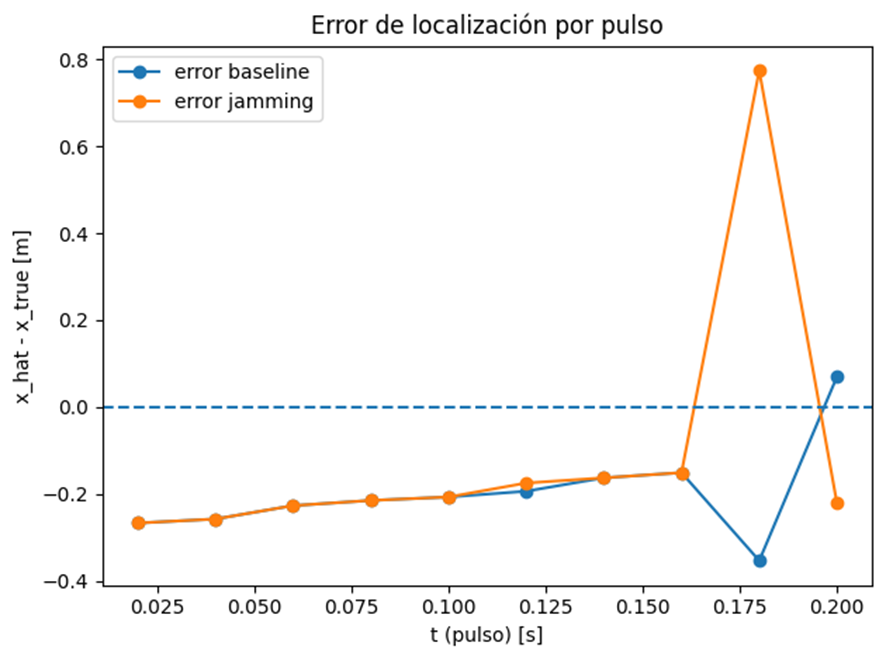
En la gráfica de error por pulso, la curva azul (baseline) se mantiene la mayor parte del tiempo en torno a valores negativos parecidos (≈ −0.3 a −0.15 m) y cambia suavemente con el pulso.
Eso indica que, sin jamming, el estimador:
- tiene un sesgo (tiende a subestimar la distancia, error negativo),
- pero su comportamiento es coherente pulso a pulso (poca variabilidad aleatoria).
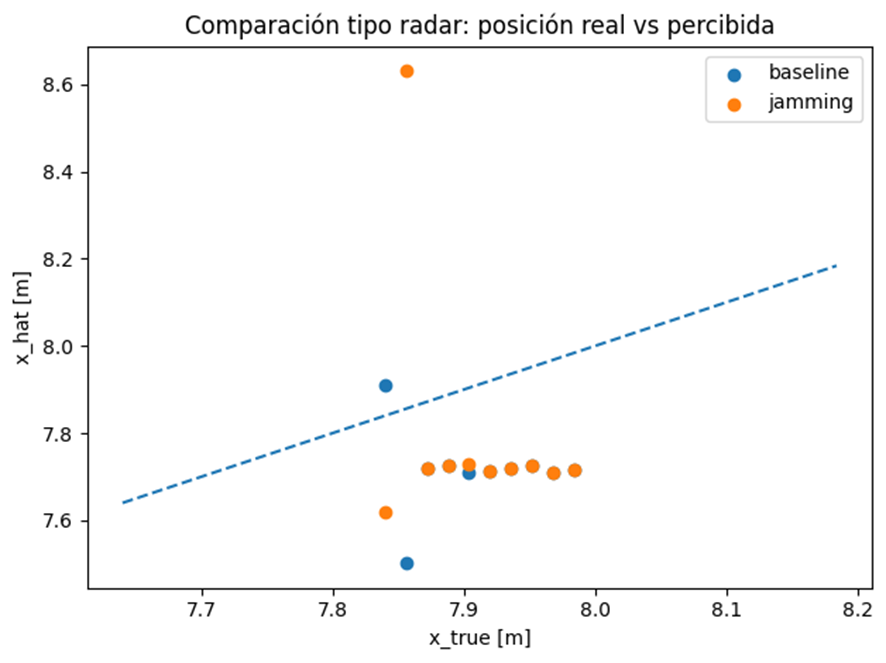
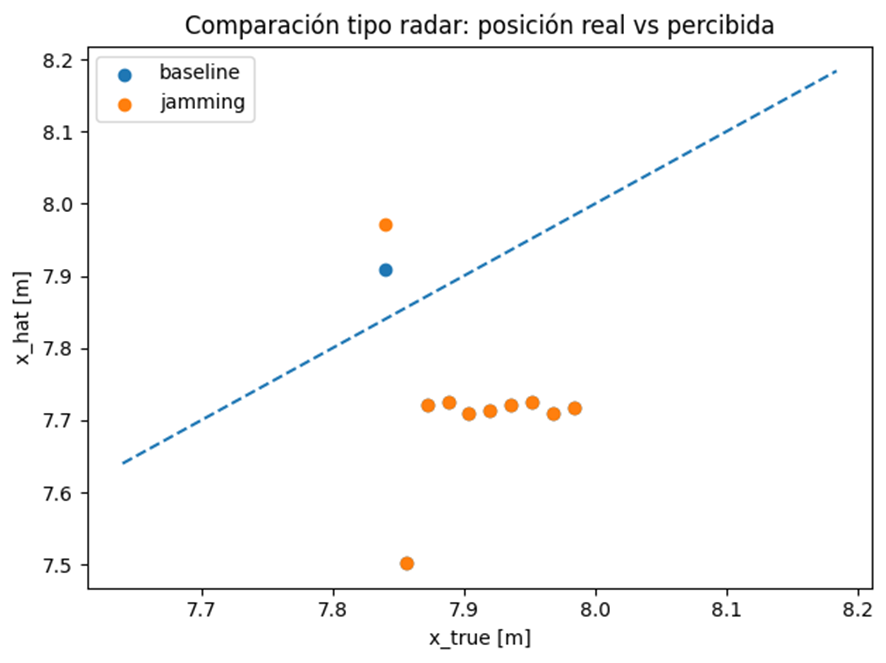
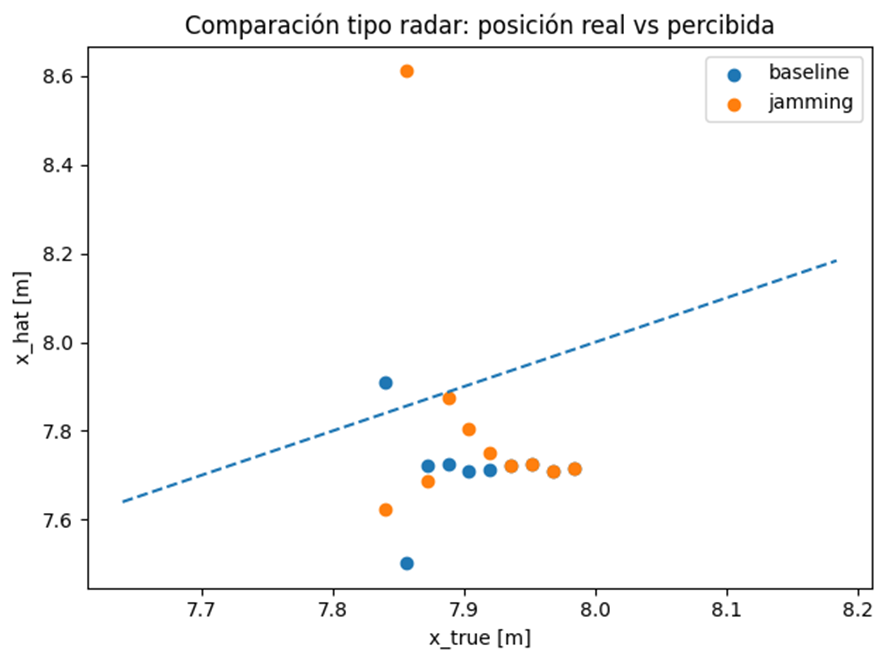
En la gráfica “radar” (x_true vs x_hat), los puntos baseline se agrupan relativamente cerca entre sí: eso es otro signo de precisión estable (aunque con bias).
2) El jamming introduce “falsos ecos” puntuales
En la gráfica de error por pulso, la curva naranja (jamming) sigue cerca del baseline durante varios pulsos, pero aparece un pulso con un salto grande positivo (≈ +0.8 m).
Eso es concuerda con el patrón típico de detección espuria:
- el correlador deja de enganchar el eco real y engancha otro pico.
- lo que en radar/sonar se interpreta como falsa alarma o falso objetivo.
En la gráfica “radar” se aprecia bastante claro: casi todos los puntos jamming están en el “racimo” baseline, pero hay uno muy separado, que rompe la relación cercana a la diagonal x_\hat \approx x.
3) El jamming no solo desplaza: sobre todo degrada la precisión
Aunque el sesgo medio del jamming parezca menos negativo en algunos pulsos, lo importante aquí es:
- aumenta la dispersión (la nube naranja es más “ancha”),
- y aparecen outliers.
Eso coincide con las métricas globales: el std con jamming sube mucho respecto a baseline.
En términos de probabilidad de captura (la motivación biológica):
- lo relevante no es que el murciélago “se equivoque un poco” siempre,
- sino que a veces se equivoque mucho (outlier), porque un único error angular/rango grande puede romper la trayectoria de interceptación.
Sin jamming, el estimador presenta un sesgo casi constante pero baja variabilidad pulso a pulso. Con jamming, la estimación mantiene valores similares la mayor parte del tiempo, pero aparecen outliers (falsos ecos) que generan errores de localización significativamente mayores. El efecto dominante del jamming no es un desplazamiento fijo, sino el aumento de dispersión y la aparición de detecciones espurias.
En lo que respecta a la estabilidad numérica del solver se garantiza imponiendo la condición CFL

verificada en ejecución. El término amortiguador

introduce disipación y contribuye a la estabilidad energética del modelo. Las inestabilidades observadas en la localización no se deben a divergencia numérica del campo acústico, sino a la sensibilidad del estimador por correlación (selección del máximo), que puede alternar entre picos cuando el jamming incrementa la energía en banda/tiempo del eco, dando lugar a falsos ecos (outliers).
Limitaciones del modelo
1) Geometría y cinemática excesivamente idealizadas
- El planteamiento 1D reduce el encuentro a una línea, sin ángulo de llegada, maniobras laterales, ni dinámica real de interceptación.
- Movimiento de polilla (y murciélago) muy simplificado: no hay trayectorias evasivas, cambios bruscos, ni acoplamiento con la percepción (feedback).
2) Propagación acústica simplificada
- No se incluye geometría 3D del frente de onda.
- El término de amortiguamiento alfa es fenomenológico (no está ligado directamente a absorción atmosférica real dependiente de f, HR, T, etc.).
- Medio homogéneo con c constante; no hay gradientes de temperatura/humedad, ni viento, ni turbulencia.
3) Modelo de eco y de jamming demasiado lineal
- El “eco” se modela como fuente secundaria proporcional a la presión incidente, lo cual no captura:
- directividad del blanco (alas/cuerpo),
- variación con orientación,
- RCS acústica dependiente de frecuencia,
- dispersión multipath o múltiples centros reflectores.
- El “jamming” es una fuente añadida en el punto de la polilla: no incluye:
- directividad real de los órganos timpánicos/estridulación,
- variabilidad de patrones de clicks,
- acoplamiento neuroetológico (cuándo empieza y cómo modula el jamming).
4) Receptor y procesamiento del murciélago demasiado idealizados
- Un murciélago real usa procesamiento auditivo con:
- filtros de banda, compresión, AGC,
- integración temporal,
- estrategias adaptativas (cambia PRF, duración y espectro).
- No se modela umbral de detección, saturación del receptor, ni ruido del sistema de medida.
- El “error” se evalúa respecto a un único estimador.
5) Condiciones de contorno y discretización
- BC “absorbentes” simples: pueden introducir reflexiones residuales o sesgos.
- Estabilidad se controla por CFL, pero falta un análisis formal de dispersión numérica (error de fase y grupo), relevante para ultrasonidos y ToF.
- La fuente discreta tipo delta repartida a nodos introduce dependencia de resultados con delta de x (sensibilidad a malla).
6) Interpretación biológica limitada
- El modelo actual demuestra “degradación del estimador” y “falsos ecos”, pero no traduce aún eso a:
- probabilidad de captura basada en dinámica real de ataque,
- beneficios evolutivos cuantitativos,
- comparación por especies / contextos
Trabajo futuro
1) Extensión geométrica: 2D/3D y angularidad
- Plantear modelo en 2D/3D
- Incluir un array de receptores (dos o más “micrófonos” virtuales) para estimar:
- rango (ToF),
- ángulo (TDOA / beamforming),
- y estudiar cómo el jamming induce errores angulares (más relevante que el rango puro).
2) Propagación más física
- Introducir atenuación geométrica.
- Considerar dispersión (vegetación/suelo) si se quiere aproximar el modelo a escenarios reales.
- Sustituir alfa por un modelo ligado a absorción atmosférica dependiente de frecuencia y condiciones ambientales.
3) Eco de polilla más realista
- Modelar la polilla como uno o varios dispersores.
- múltiples “glints” (alas/cuerpo) → varios retardos,
- dependencia con orientación y batido de alas.
- Esto además generaría falsos ecos “naturales”, útil para comparar contra los inducidos por jamming. De hecho, otro tipo de polillas reducen su huella (defensa pasiva) gracias a la geometría y textura de su cuerpo.
4) Modelo del murciélago como estimador y como perseguidor. Entre otras mejoras, se podría evaluar la definición de “captura” por distancia mínima en el plano con dinámica de vuelo.
5) Validación y calibración con datos
- Confrontar rangos de parámetros con literatura por especies concretas.
- Validar cualitativamente contra resultados experimentales: p. ej. cómo varía la tasa de fallos con timing, entre.
6) Análisis numérico formal

Fuentes:
https://pubmed.ncbi.nlm.nih.gov/19608920/
https://pmc.ncbi.nlm.nih.gov/articles/PMC9231501/
https://www.pnas.org/doi/10.1073/pnas.1416679112